Description Of Specific Functions
V800 Series High Performance Closed-Loop Vector Inverter User Manual
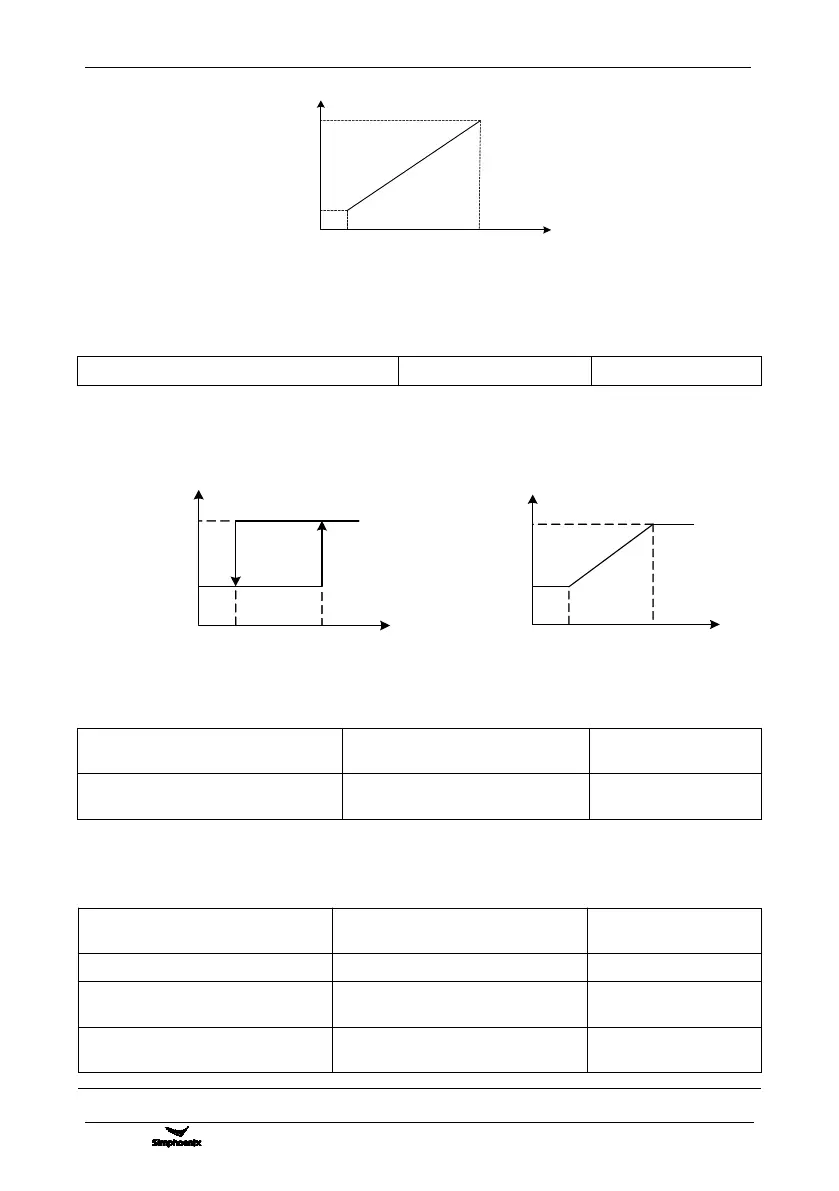
Revolution
feedback
Maximum
feedback value
Motor revolution
Minimum
feedback value
[F8.0.15]
[F8.0.16]
0
7.33 REVOLUTION CLOSED-LOOP PARAMETER (GROUP F8.1)
F8.1.18 Controller parameter selection
0: Single PID parameter (the second group of parameters is effective by default)
1: Dual PID parameter (hysteresis switching)
2: Dual PID parameter (continuous switching)
ASR-PID
Motor
revolution
P=[F8.1.25]
I=[F8.1.26]
D=[F8.1.27]
0
[F8.1.20]
[F8.1.19]
P=[F8.1.21]
I=[F8.1.22]
D=[F8.1.23]
ASR-PID
Motor
revolution
P=[F8.1.25]
I=[F8.1.26]
D=[F8.1.27]
0
[F8.1.20]
[F8.1.19]
P=[F8.1.21]
I=[F8.1.22]
D=[F8.1.23]
F8.1.19 PID revolution with
parameter switching
Setting range: 0~[F8.1.20]
F8.1.20 PID parameter switching
upper limiting revolution
Setting range: [F8.1.19]~60*
[F0.1.21] Motor pole pairs (rpm)
The parameters are effective in the condition of double PID parameter hysteresis switching; the first group
parameter is effective when it is lower to switching lower revolution [F8.1.18]; The second group parameter is
effective when it is higher than switching upper revolution.
F8.1.21 Proportional gain 1
(ASR-P1)
F8.1.22 Integral time 1 (ASR-I1)
Setting range:0.0,0.01~50.00Sec.
F8.1.23 Differential coefficient
1 (ASR-D1)
Setting range: 0.0, 0.01~10.00
F8.1.24 Differential output
filtering constant 1 (ASR-DT1)
Setting range:0.10~5.00Sec.
parameter (hysteresis switching)
parameter (continuous switching)
Figure 7-62 Corresponding Relation of Revolution Feedback Value and Motor Revolution