Printed in the Federal Republic of Germany TR-Electronic GmbH 2016, All Rights Reserved
09/29/2020 TR-EMO-BA-GB-0022 v03 Page 37 of 153
5.2.3 Perform positioning
If the drive is in the "Ready for operation" state, positioning movements can be
performed.
For this purpose the "Profile Position (PP)" operating mode must be set and the
operating mode must then be executed with the control word:
Object 0x6060 operating mode = 1
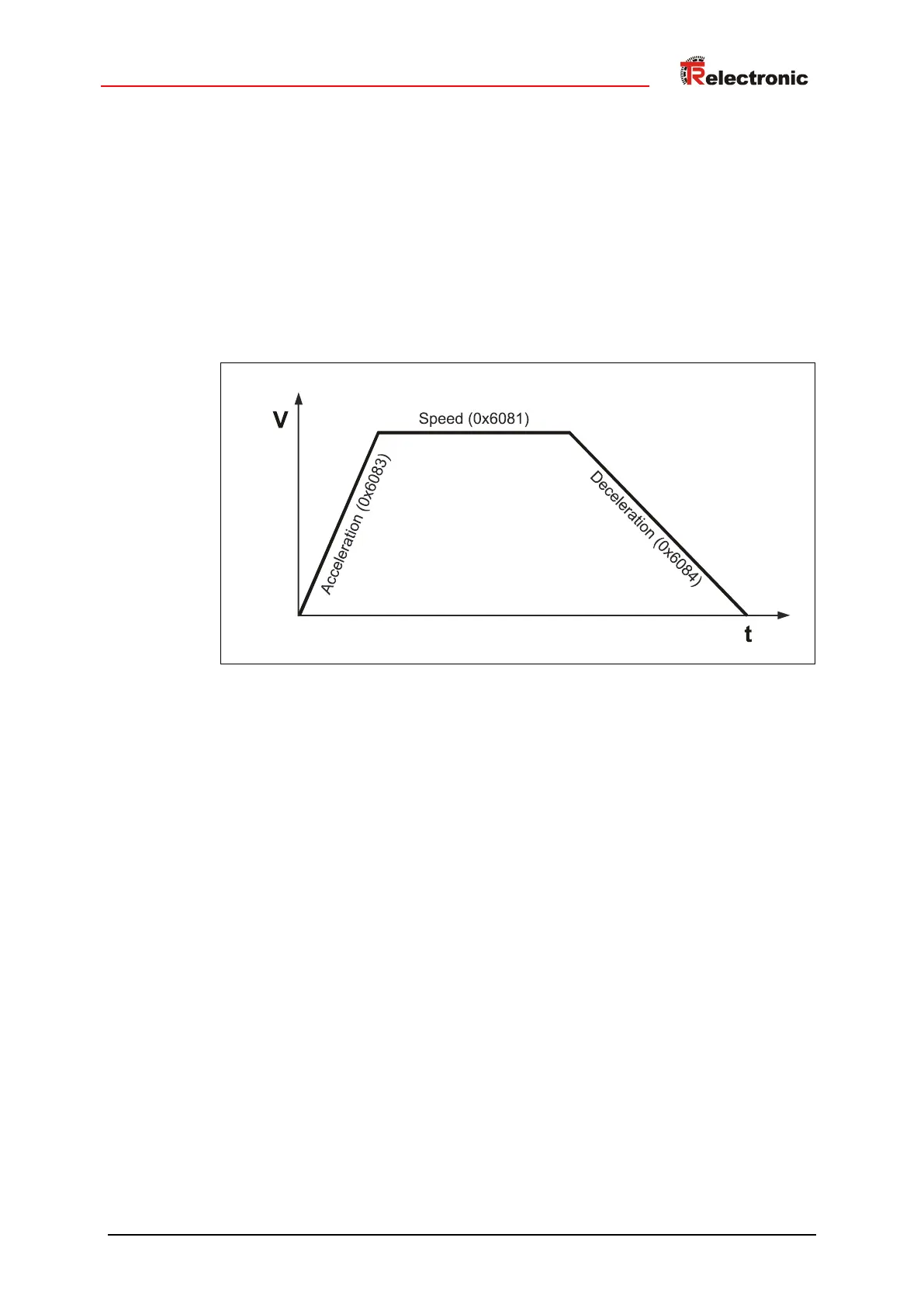
A positioning ramp is started by a falling edge (1->0) in STW.8. The positioning
movement is carried out on a ramp, which is derived from the current settings for the
speed, acceleration and deceleration:
Figure 10: Positioning ramp
Depending on the distance between actual position at the start of positioning and
target position, the required end speed (0x6081) is reached or not. If the travel is
short, the phase with constant acceleration is directly followed by a phase with
constant deceleration. There is no phase with constant speed in this case.
The conclusion of a positioning movement is indicated by ZSW.10. If this bit has the
value 1, the positioning is complete. The applicable criterion for the end of a
positioning movement is that the current position value lies within the position window
(0x6067) around the target position for the duration of the position window time
interval (0x6068).