TR-Electronic GmbH 2016, All Rights Reserved Printed in the Federal Republic of Germany
Page 38 of 153 TR-EMO-BA-GB-0022 v03 09/29/2020
5.2.3.1 Absolute / relative positioning
A positioning movement can be performed absolutely or relatively. This is
differentiated by means of STW.6. If this bit is set, a relative positioning movement is
performed, otherwise an absolute positioning movement is performed.
In the case of absolute positioning, the value for the target position (0x607A) is
interpreted absolutely, i.e. the distance to be covered is the difference between actual
and target position. In the case of relative positioning, the content of object 0x607A is
interpreted as the distance to be covered.
Relative positionings must be within the travel range. The limits are defined by
means of the objects 0x607B Position range limit and 0x607D Software
position limit.
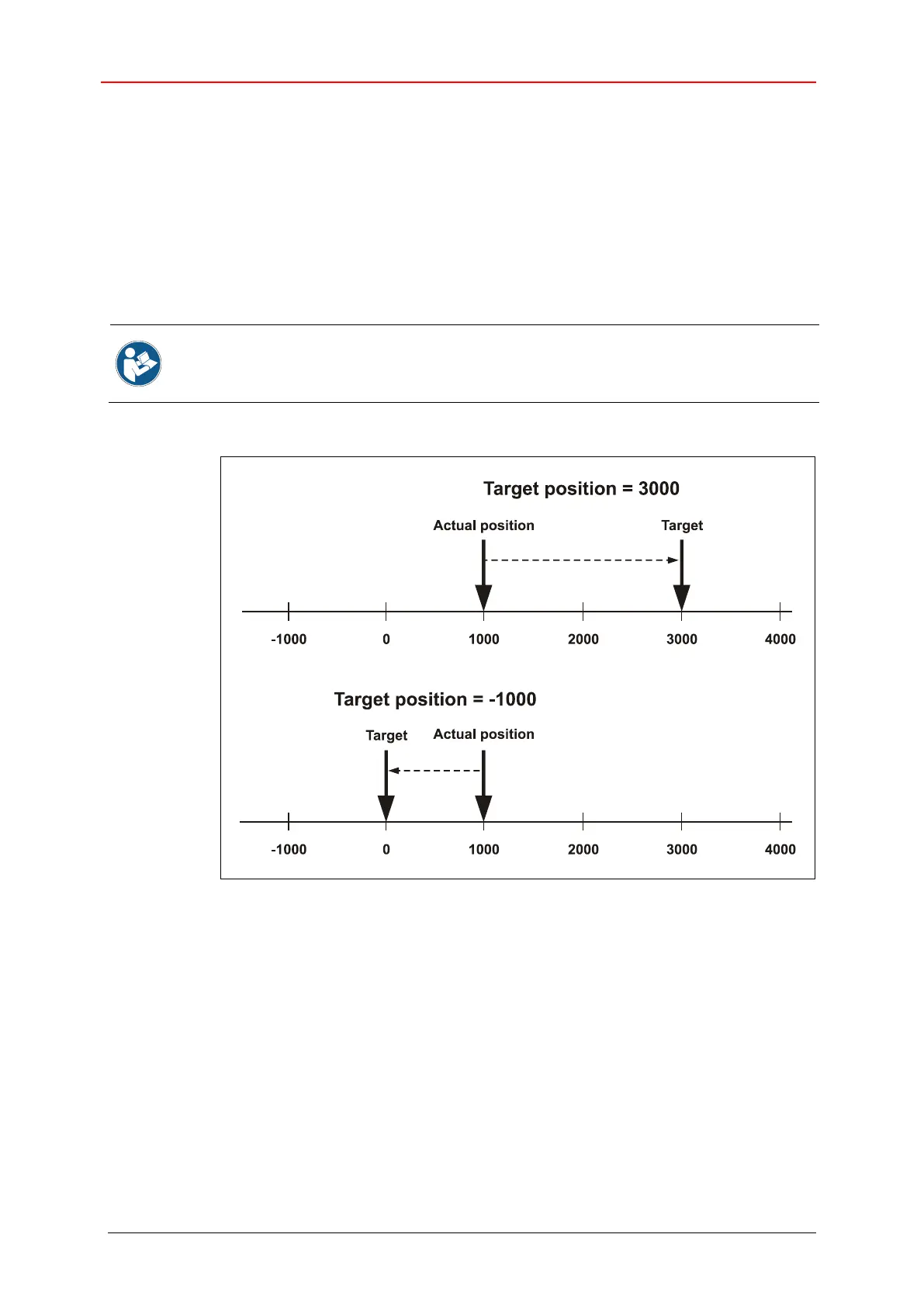
Figure 11: Absolute positioning (top) and relative positioning (bottom)
Figure 11 shows two examples:
In the top part of the figure, an absolute positioning movement is performed to the
target position 3000. The drive changes its position until it reaches position 3000. A
relative positioning movement is performed in the bottom part: Starting from the actual
position 1000, a positioning movement by 1000 to the left (target position = -1000) is
to be performed. This means that the positioning movement ends at the absolute
position 0.