Printed in the Federal Republic of Germany TR-Electronic GmbH 2016, All Rights Reserved
09/29/2020 TR-EMO-BA-GB-0022 v03 Page 47 of 153
5.5 “Cyclic Synchronous Position (CSP)” operating mode
In this mode, the drive receives the position target at fixed time intervals (cycles) from
the control. In this case, the drive no longer calculates ramps but only transfers the
target values directly to the positioning control.
In this operating mode the limit switches on the digital inputs 2
0
and 2
1
are ignored.
The target position is transferred cyclically via PDO by means of the object 0x607A, to
which the drive responds immediately. Bit 4 in the control word does not have to be
set.
The target value is absolute and thus independent of how often it was sent per cycle.
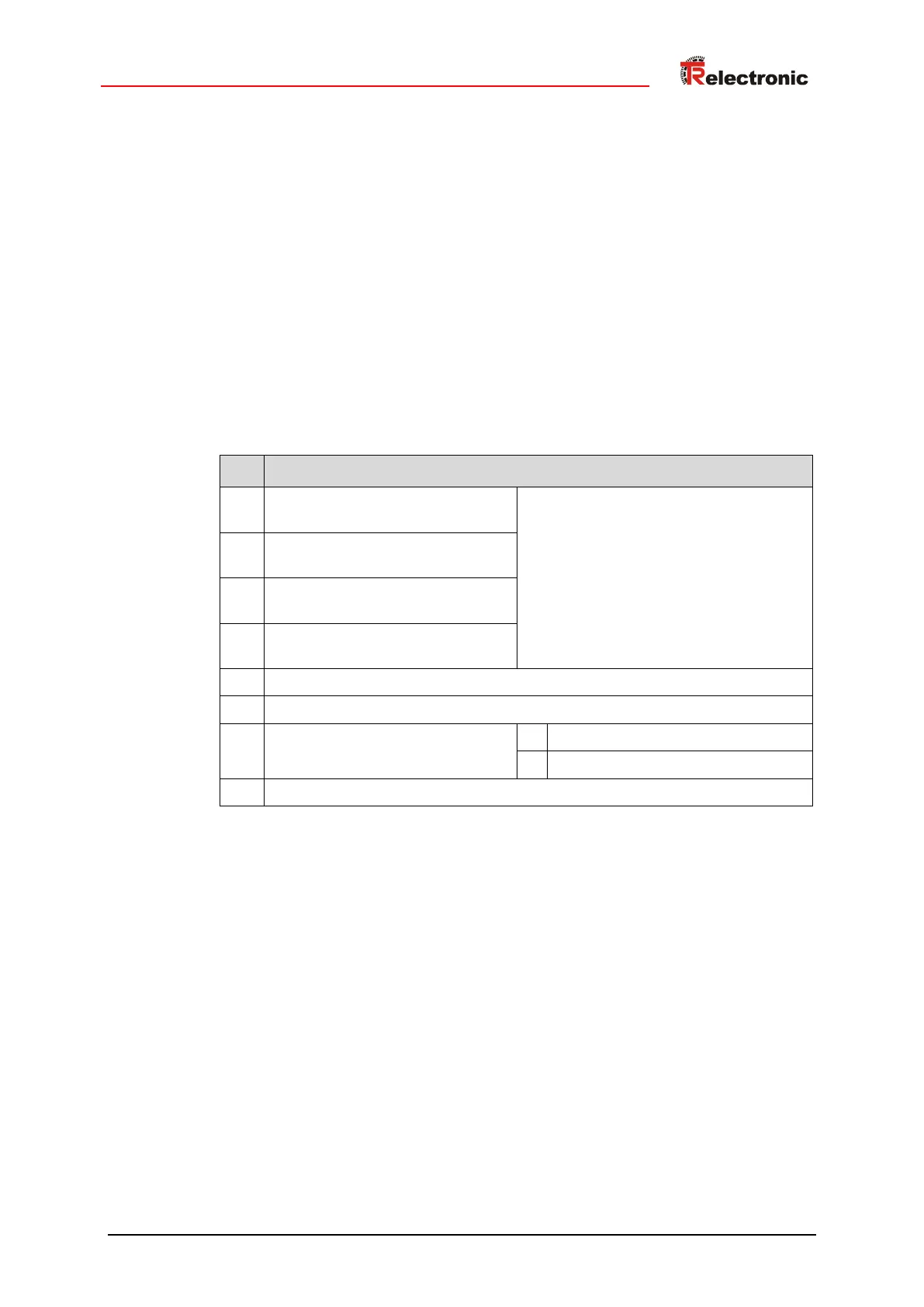
5.5.1 Control word
Value 1:
Switch ready for operation
These bits are used to control
the state machine
Value 0:
Shutdown without stop ramp
Value 1:
Execute operating mode
Transition 0->1: Reset error
Table 17: Control word (object 0x6040), “Cyclic synchronous position (CSP)” operating mode