Preliminary Technical Data UG-1828
Rev. PrB | Page 177 of 277
DATA, d(
t
) INPUT, x(
t
)
OUTPUT, y(
t
)
FREQUENCY
MAGNITUDE
MAGNITUDE
FREQUENCY
MAGNITUDE
FREQUENCY
OUTPUT
INPUT
OUTPUT
OUTPUT
INPUT
INPUT
COMPRESSION
PREDISTORTOR PA
DPD
COEFFICIENTS
COMPUTAION
24159-141
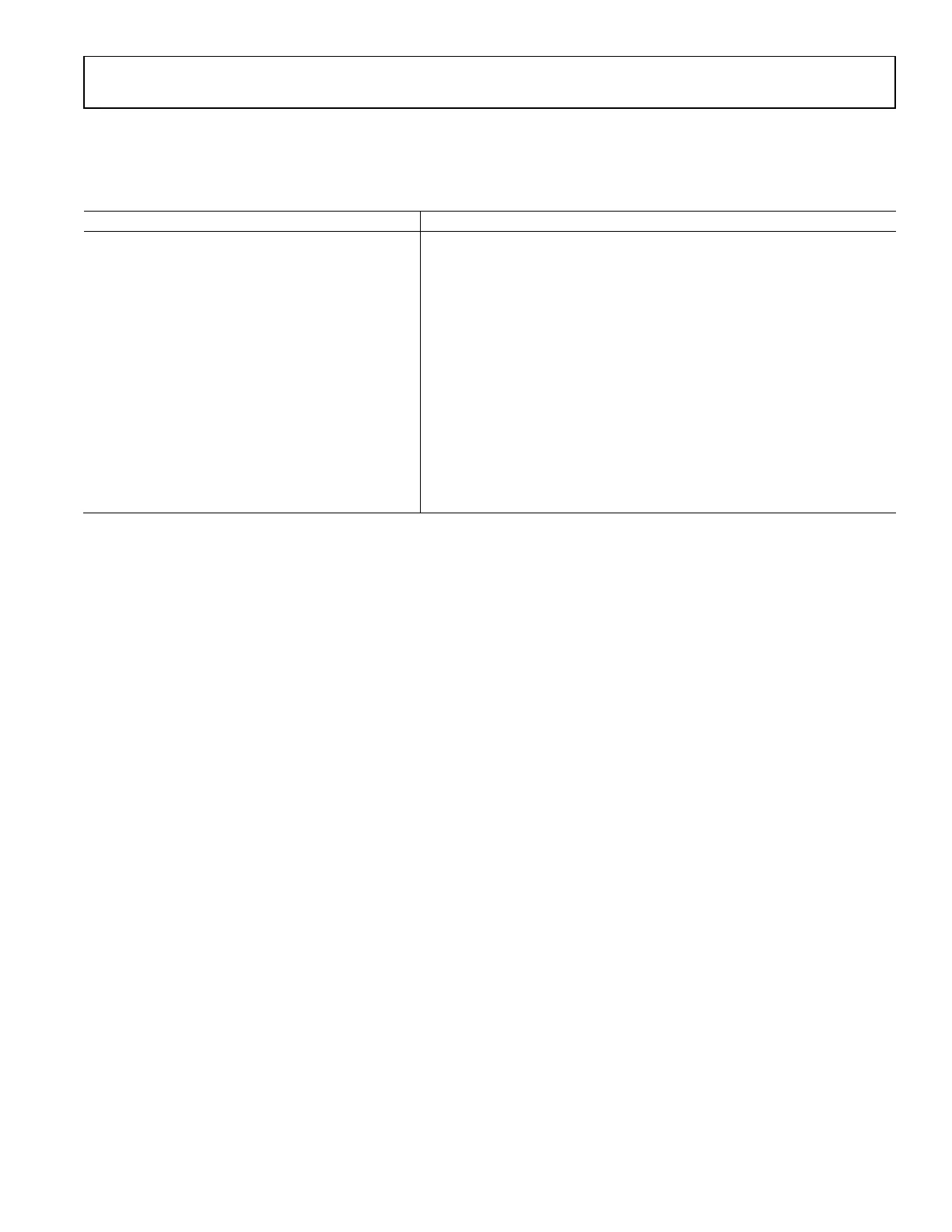
Figure 168. High Level Block Diagram of DPD Algorithm
In the ADRV9001 device, DPD is considered as one of the transmitter tracking calibrations. It is a real-time signal processing with
iterative updates to account for hardware variations such as temperature and power level changes. Similar to some other transmitter
tracking calibrations, it requires a loopback path from the transmitter to the observation receiver (ORx) to perform the calibration. In
this case, an external loop back path (ELB) type 2 is required (please refer to the Receiver/Observation Receiver Signal Chain section for
more details about the loopback paths), in which, the transmitter output signal after power amplifier is looped back to the ORx as shown
in Figure 168. The user must make sure this path is established before enabling the integrated DPD. In FDD applications where only one
Rx is used or in the TDD applications during transmit time slots, unused receiver path can be used to perform DPD calibration as well as
some other transmitter tracking calibrations. Please refer to ADRV9001 Example Use Cases section for more details.
DPD
ACTUATOR
DPD
LO
SYNTHESIZER
BALUN
POWER
AMPLIFIER
ELB TYPE 2
DIRECTIONAL
COUPLER
DUPLEXER
ANTENNA
DAC
COEFFICIENTS
CALCULATION
ENGINE
DAC
Tx ANALOG FRONT END
ADRV9001
Tx DATA
+
LO
SYNTHESIZER
BALUN
ADC
ADC
ORx ANALOG FRONT END
24159-142
Figure 169. High level Block Diagram of ADRV9001 DPD Implementation
Similar to what is shown in Figure 168, ADRV9001 DPD includes 2 major components, a “DPD Actuator” and a “Coefficients
Calculation Engine”. The “Coefficients Calculation Engine” computes the DPD coefficients periodically and then updates the “DPD
Actuator” for real-time pre-distortion of the transmit signal. The pre-distortion coefficients are associated with polynomial terms defined
by the power amplifier model. In order to meet the real-time processing requirement, polynomial terms that are associated with a
common time-delay input data are pre-computed and stored into Look-up Tables (LUT) in the “DPD Actuator”. In the device, without
frequency hopping, 2 LUTs are used for all waveforms, one is currently being active for performing pre-distortion while the other one is
being updated at the background to track the changes and replace the current LUT when ready, resulting in seamless transmit operation.
“DPD Actuator” also includes a functionality to perform the calculation of the amplitude of the input signal, which is used to search the
LUT. The outputs of the LUT are then multiplied with different time delayed input data according to the configured DPD model and
combined to form the final pre-distorted transmit data.
 Loading...
Loading...