AX-Series Motion Controller Instructions Manual Chapter 2
168
*Note: DMC_ERROR: Enumeration (ENUM)
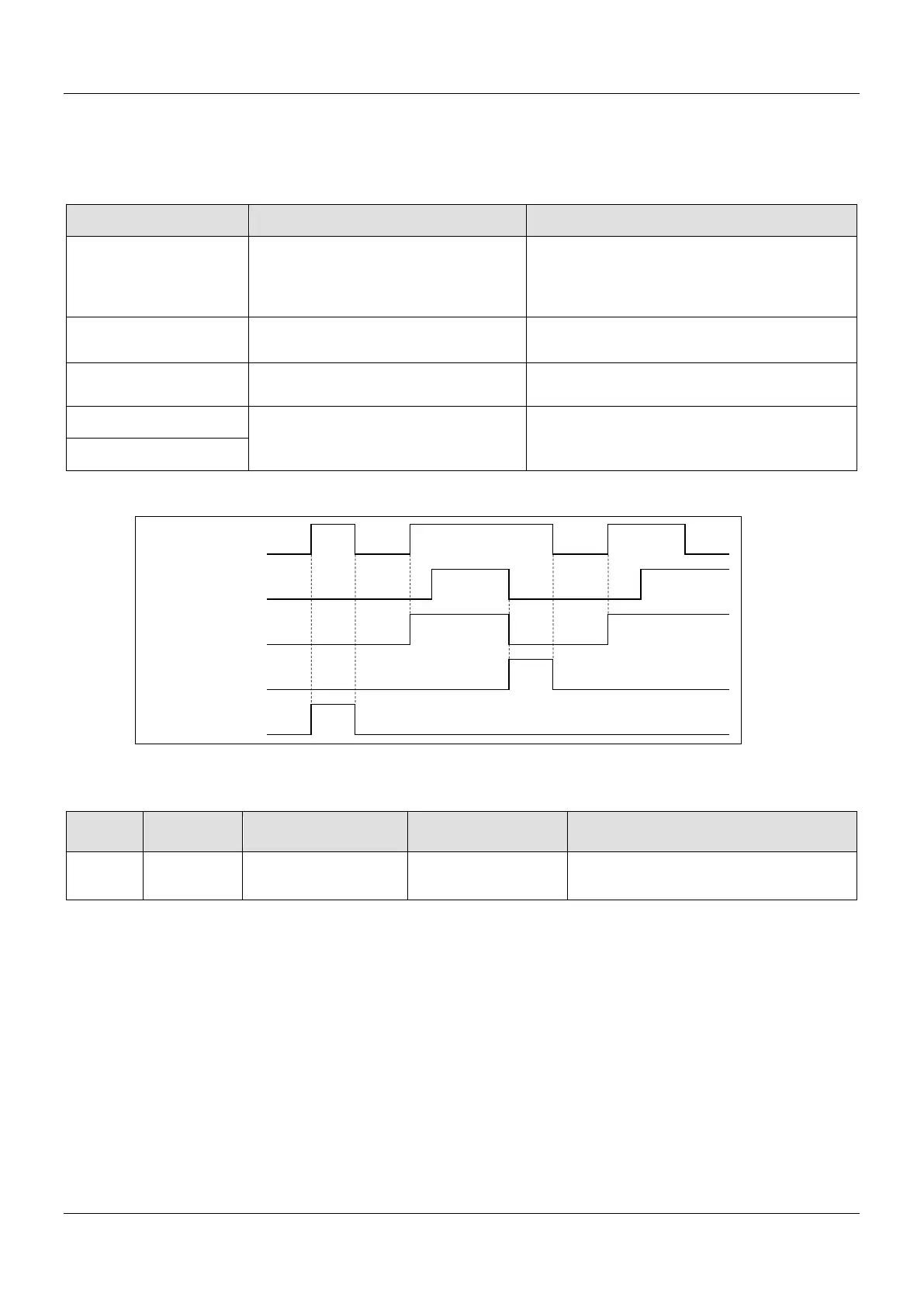
Output Update Timing
Timing for shifting to True
Timing for shifting to False
bInTorque
When the bEnable is True and the axis
motion state can be read.
When bEnable turns to False.
When bError turns to True.
bBusy
When bEnable turns to True.
When bEnable turns to False.
When bError turns to True.
bCommandAborted
When this instruction is aborted by
another instruction.
When bEnable turns to False.
bError
When an error occurs in the execution
conditions or input values for the
instruction.
When bEnable turns to False. (The value in
ErrorID is cleared.)
ErrorID
Timing Diagram
Inputs/Outputs
Name Function Data Type
Setting Value
Timing to Take Effect
Axis
Specify the
AXIS_REF_SM3
*
AXIS_REF_SM3
When bEnable turns to True and bBusy is
*Note:
AXIS_REF_SM3 (FB): All function blocks contain this variable, which works as the starting program for function blocks.
Function
When bEnable turns to True, the values of lrTorque, dwTorqueRamp and lrVelocity of the DMC_TorqueControl
instruction are sent to the servo for torque control.
When bEnable is False, set the target torque lrTorque to 0 to make the axis decelerate to a stop. The instruction
execution is completed when the axis decelerates to a stop and bBusy turns to False.
Ensure that the axis is in Standstill state before instruction execution.
The servo will perform an immediate stop if SMC_SetControllerMode interrupts DMC_TorqueControl during
instruction execution. Do not do so.
Only one DMC_TorqueControl instruction is allowed to run at a time. If the second DMC_TorqueControl instruction is
also run at the same moment, an error “DMC_TC_FB_CONFLICT” will occur.
 Loading...
Loading...

