AX-Series Motion Controller Instructions Manual Chapter 2
170
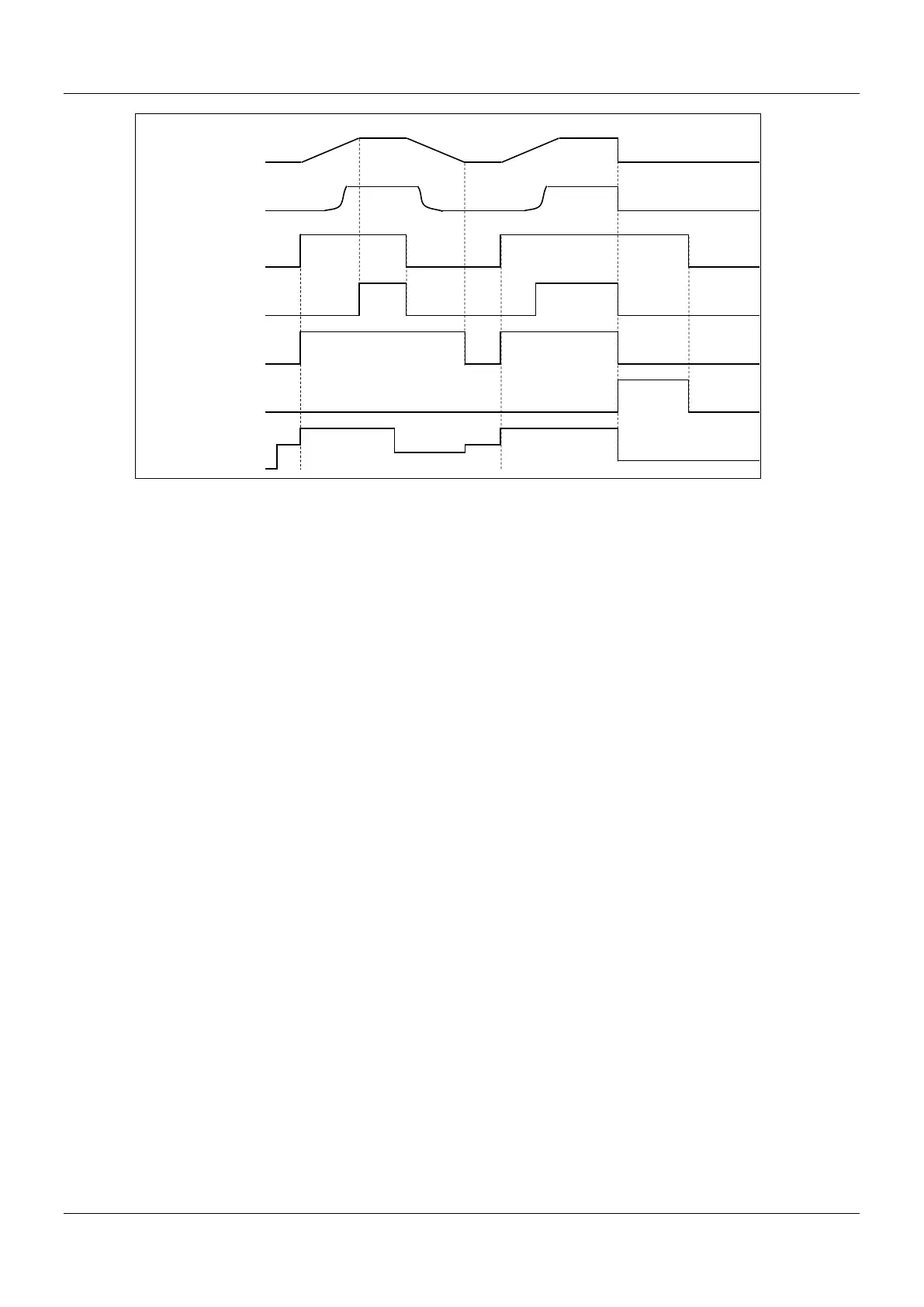
After DMC_TorqueControl has started, the servo starts to run according to the input settings of the instruction for
the target torque lrTorque, change rate of the torque dwTorqueRamp and maximum velocity lrVelocity.
After bEnable of DMC_TorqueControl turns to False, the axis starts to decelerate till it stops. When the axis
decelerates to a stop, bBusy turns to False.
An error occurs on the axis while DMC_TorqueControl has been run for a period of time after being started one
more time. At the moment, the axis performs an immediate stop for the error and then the instruction will report
an error.
 Loading...
Loading...

