AX-Series Motion Controller Instructions Manual Chapter 2
237
If an error occurs during the execution of the instruction, you can refer to the content of ErrorID (error code) to confirm
the current error status.
Programming Example
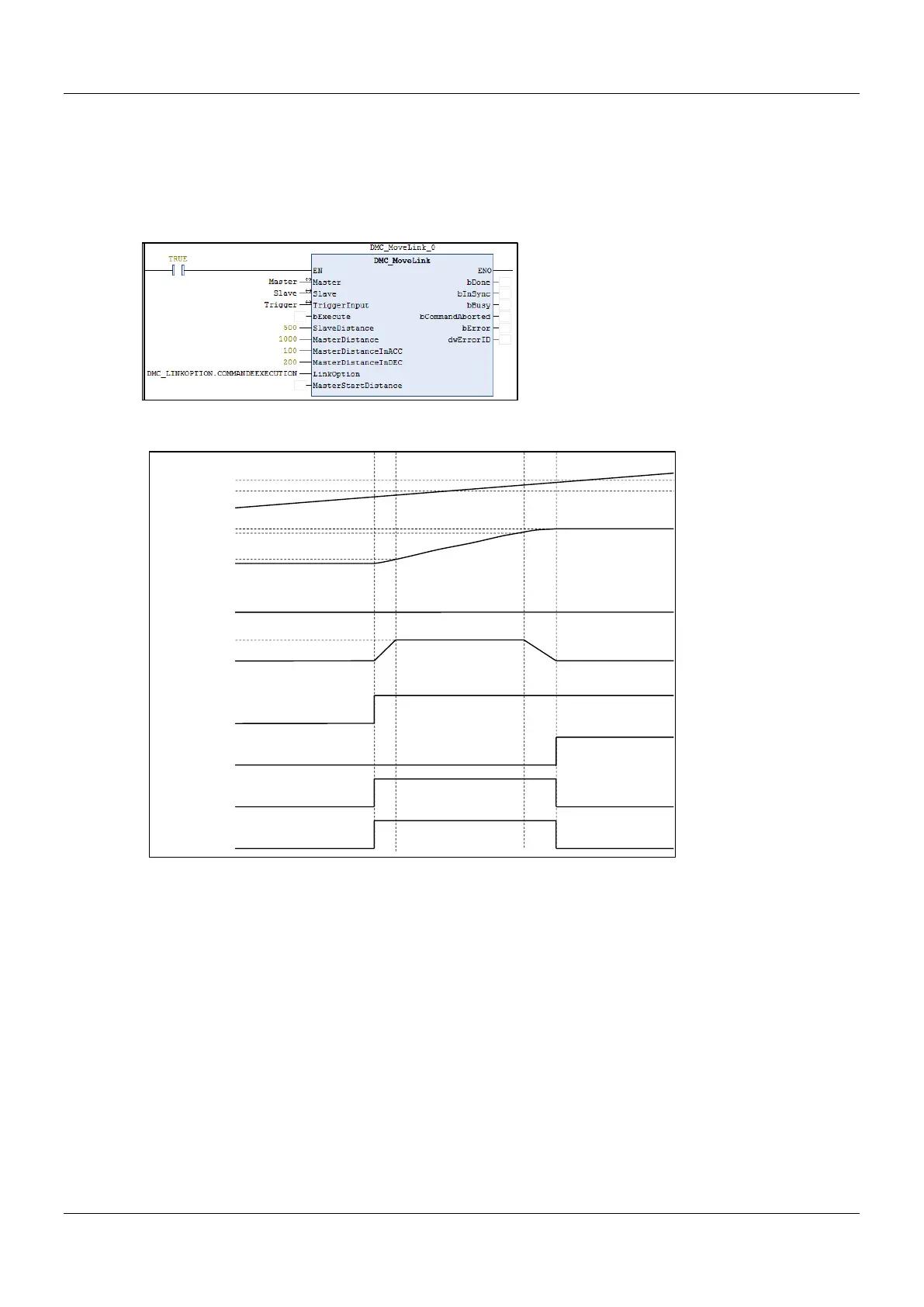
Sample Program1:
The example shows that DMC_MoveLink operates in COMMANDEEXECUTION mode.
Timing Diagram
5. When the LinkOption is set to COMMANDEEXECUTION, the Slave Axis enters the synchronization mode
immediately after DMC_MoveLink is activated, and performs positioning motion according to the speed of the
Master Axis.
6. According to the four parameters of MasterDistanceInACC, MasterDistanceInDEC, MasterDistance and
SlaveDistance, the distance of Slave AxisAcceleration Section can be calculated as 29.4118, and the distance
of Slave AxisDeceleration Section is 58.824.
7. When the Slave Axis completes the dynamic movement, the Slave Axis leaves the synchronization
relationship, and DMC_MoveLink completes the synchronous positioning movement.
Sample Program 2:
The example shows that DMC_MoveLink operates in TRIGGERDETECTION mode. (External trigger using controller
mode)
 Loading...
Loading...

