AX-Series Motion Controller Instructions Manual Chapter 2
396
If an error occurs during the execution of the instruction, bError will turn to True and the axis motion will stop. To
confirm current error state, see the error code in ErrorID.
For the error codes and corresponding troubleshooting methods, refer to the Appendix of this manual.
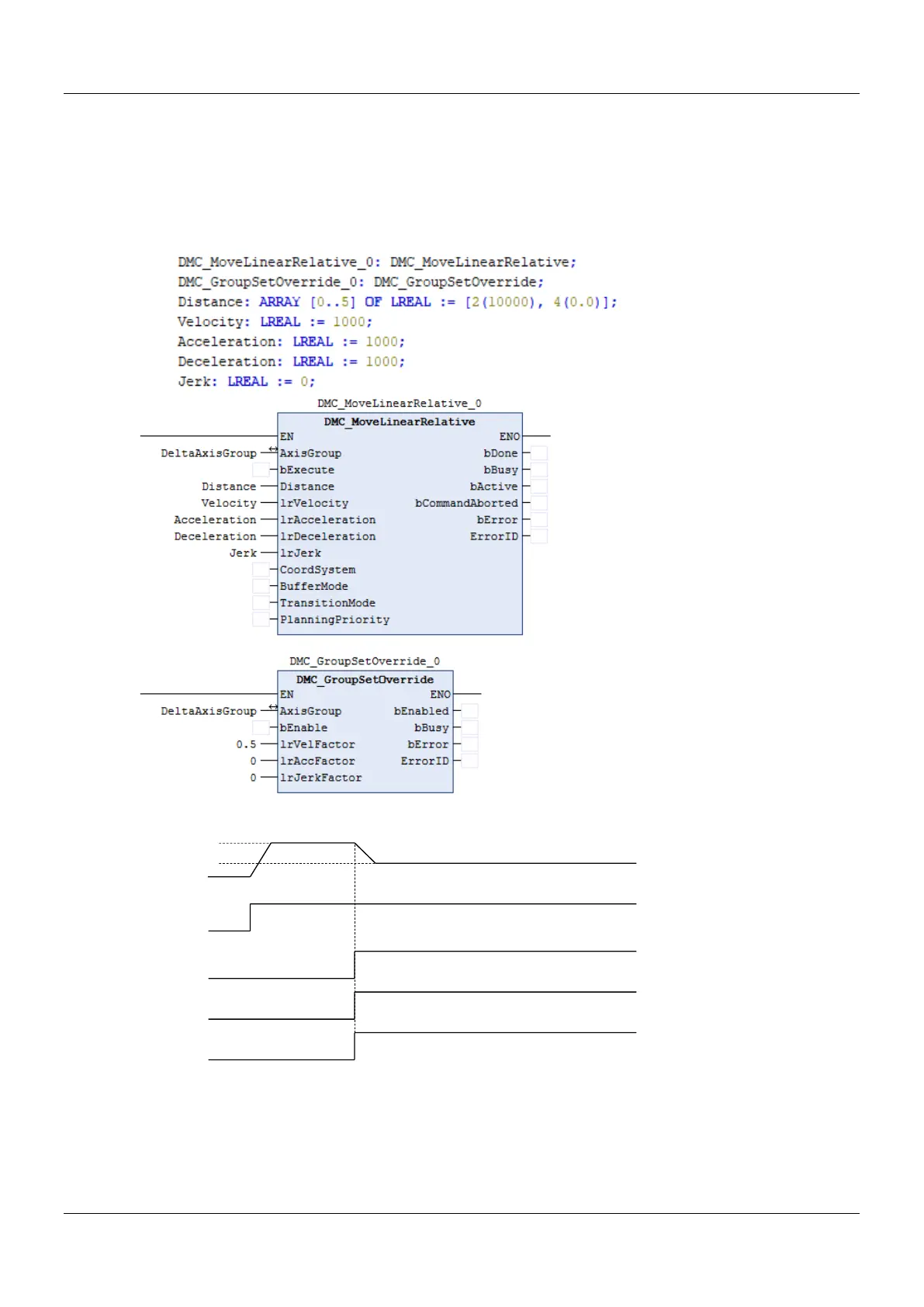
Example
This example shows how to use DMC_GroupSetOverride to change the velocity during axis group motion.
Timing Diagram
1. When DMC_MoveLinearRelative.bExecute starts, the axis group runs at the velocity of 1000 set by
DMC_MoveLinearRelative.lrVelocity.
2. At this time, DMC_GroupSetOverride.bEnable is True, and then DMC_GroupSetOverride.lrVelFactor is set to 0.5. The axis
group velocity is 1000 * 0.5 = 500. The axis group will continue to run at the deceleration of 500 set by
DMC_MoveLinearRelative.
 Loading...
Loading...

