AX-Series Motion Controller Instructions Manual Chapter 2
443
Name Timing for shifting to True Timing for shifting to False
change to False after maintaining a True state
for a scan cycle.
When an error occurs in the execution
conditions or input values for the
instruction.
When bExecute turns to False. (Error Code is
cleared)
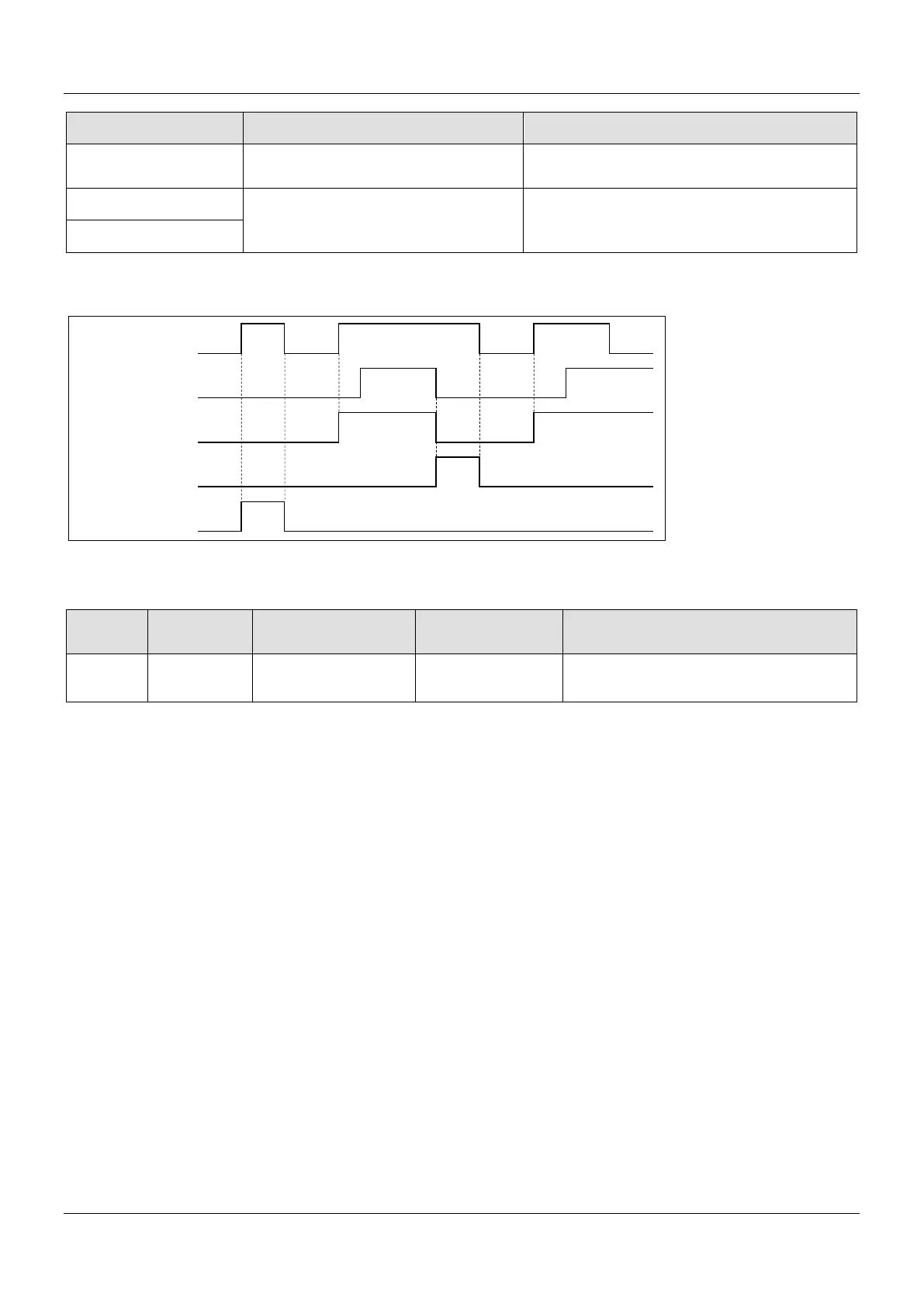
Timing Diagram
Inputs/Outputs
Name Function Data Type
Setting Value
Timing to Take Effect
Axis
Specify the
axis.
AXIS_REF_DML
*
AXIS_REF_DML
When bExecute turns to True and bBusy is
False.
*Note:
AXIS_REF_DML (FB): All function blocks contain this variable, which works as the starting program for function blocks.
Function
When bExecute of the instruction turns to True, the target torque (lrTorque), torque ramp (dwTorqueRamp) and
maximum velocity (lrVelocity) will be sent to the servo for servo torque control.
When bExecute is True, the instruction is run for a velocity-constant motion according to the specified target velocity
(lrVelocity), acceleration rate (lrAcceleration) and deceleration rate (lrDeceleration).
The executing MC_TorqueControl_DML can be aborted by executing another motion instruction.
When MC_TorqueControl_DML is aborted by another motion instruction, the output bInTorque will shift to False and
the output bCommandAborted will shift to True.
When bExecute of MC_TorqueControl_DML turns to True, the axis starts to move according to the target velocity. Even
if bExecute turns to False, the instruction execution will not be affected.
When bExecute of MC_TorqueControl_DML turns to True again and a new lrTorque value is set, the torque of the axis
is adjusted to the new torque value.
When its bExecute turns to False after the instruction is run and the target torque is reached, bInTorque of
MC_TorqueControl_DML turns to True. Afterward, bInTorque will remain True until it is aborted by another instruction.
When using C2000+ or CH2000 Series AC Motor Drives, it is necessary to configure 0x6064 (Position actual value)
and 0x6077 (Torque actual value) to the Slave PDO (Process data) mapping data.
Troubleshooting
 Loading...
Loading...

