AX-Series Motion Controller Instructions Manual Chapter 2
45
1.4 Ramp in positive, Ramp in negative (StartMode = 3, 4)
With a rotary/modulo slave axis, ramp_in_pos compensates only in the positive direction and ramp_in_neg in
the negative direction. For linear slaves, the compensation direction is generated automatically with
ramp_in_pos, ramp_in_neg, and ramp_in mode, which also means these three modes are under the same
running condition.
2. Absolute mode on master axis (MasterAbsolute = true),
Relative mode on slave axis (SlaveAbsolute = false)
2.1 Absolute/ Relative mode (StartMode = 0, 1)
The defined positions of master and slave axis when cam is engaged, respectively, are master current
position and the slave position from the cam table added on the slave current position (180+65 = 245). In
addition, a jump will occur if the start point of master axis is not same as the start position on cam table.
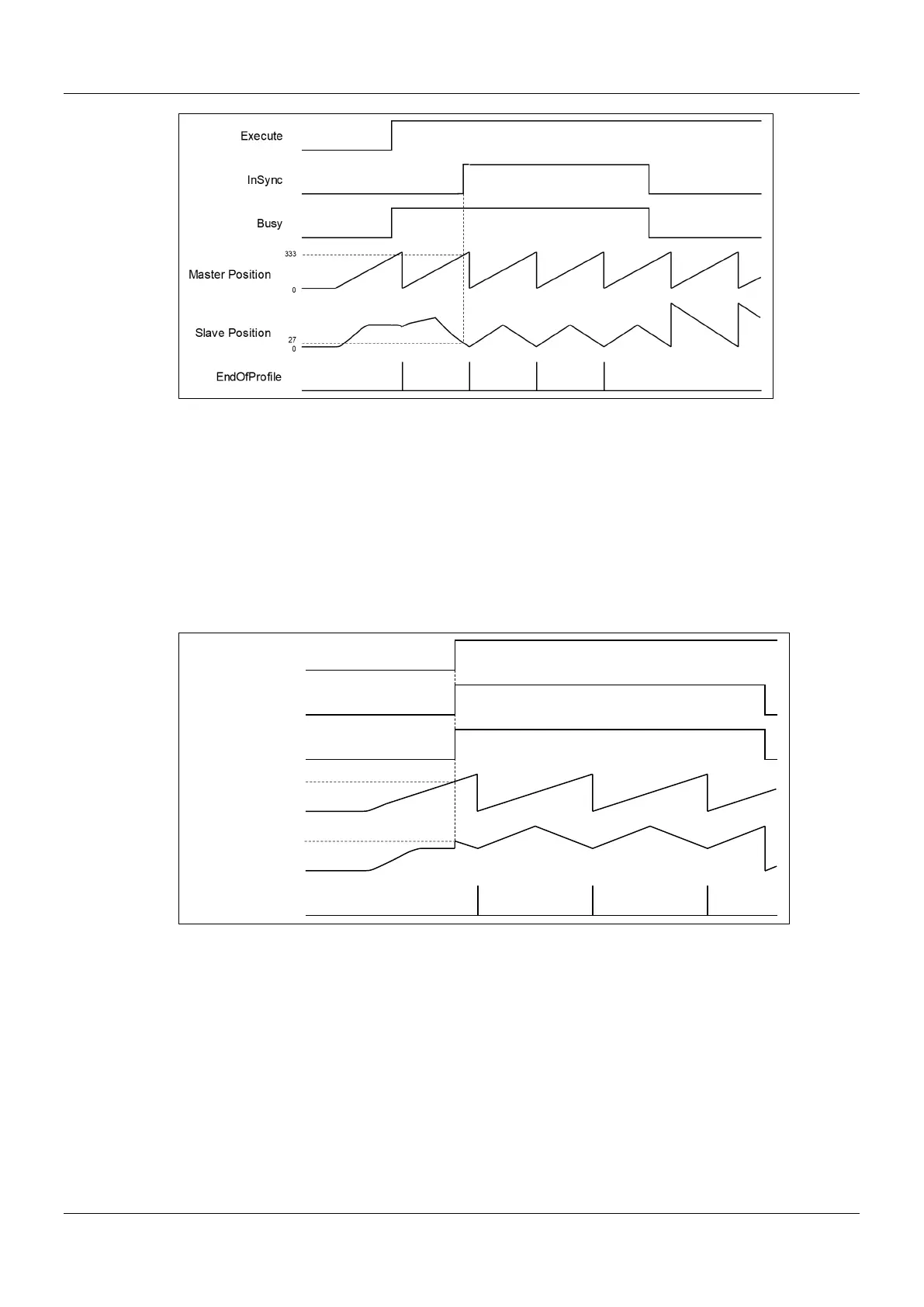
2.2 Ramp in mode (StartMode = 2)
The defined positions of master and slave axis when cam is engaged, respectively, are master current
position and the slave position added with a motion curve for compensation, which is configured via
VelocituDiff, Acceleration and Deceleration settings, for the purpose of preventing a jump while ramping in.
The slave meshing position will be the position on the cam table plus slave current position (61 + 180 = 241).
 Loading...
Loading...

