AX-Series Motion Controller Instructions Manual Appendix A
517
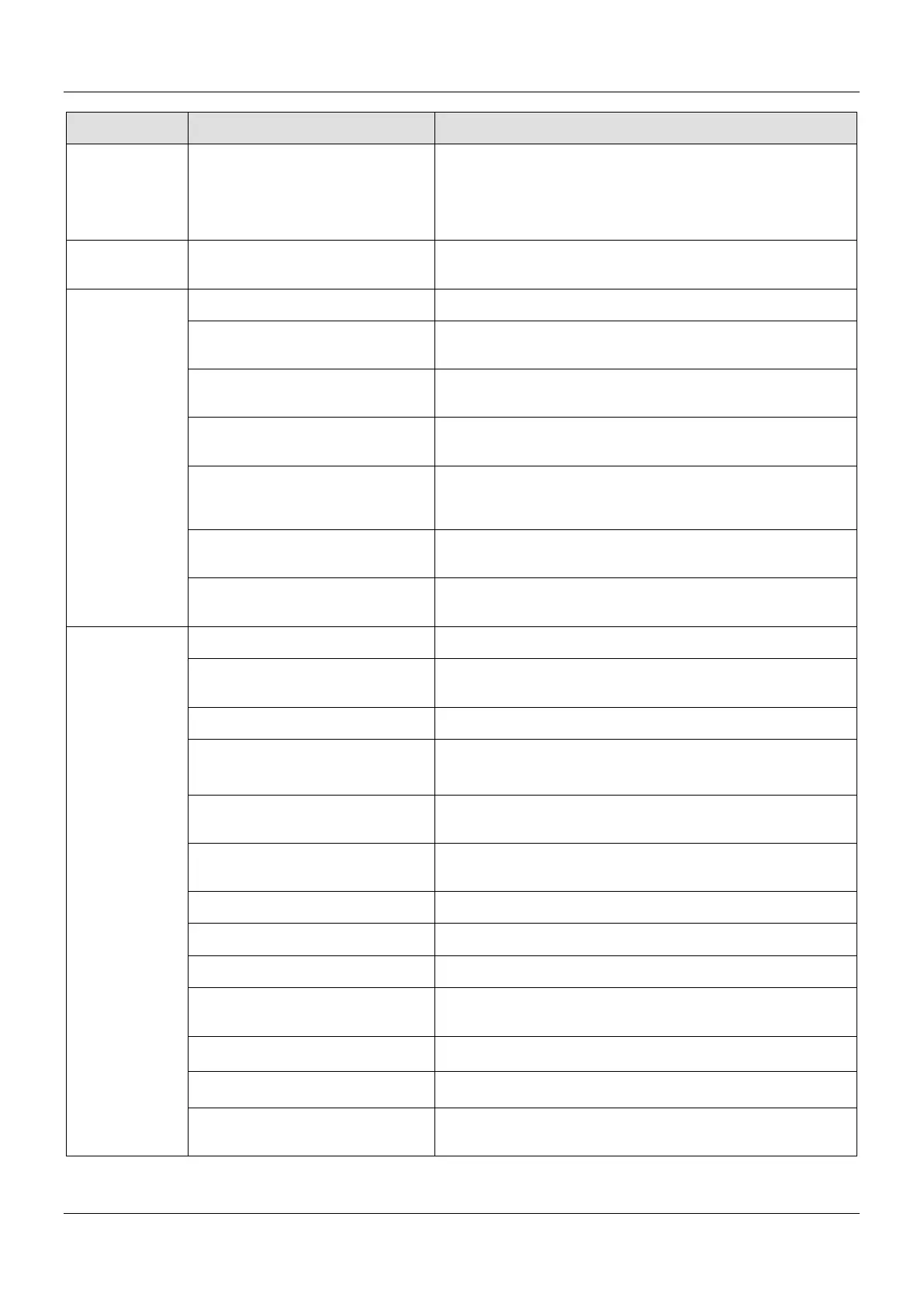
Categories Name Description
DMC_VelocityControl
DMC_VelocityControl performs a velocity control on a specified
axis in the CSV speed mode with the specified behavior and an
average velocity.
Torque control DMC_TorqueControl
DMC_TorqueControl controls the torque according to the torque
control mode of the servo drive.
Sync control
MC_CamIn MC_CamIn performs cam operation.
MC_CamOut
MC_CamOut deactivates the meshing between master and slave
MC_GearIn
The function block MC_GearIn activates a linear master-slave
MC_GearOut
MC_GearOut disconnects the gear relation (velocity) between
MC_GearInPos
MC_GearInPos establish a gear synchronization relationship
between the master axis and the slave axis at the specified
location.
MC_Phasing
MC_Phasing specifies the phase shift value between the master
DMC_MoveLink
DMC_MoveLink enables the slave axis to follow the master axis
for synchronous positioning movement.
Administrative
MC_Power MC_Power enables or disables the specific axis.
MC_SetPosition
MC_SetPositionn changes the current position by shifting the
MC_ReadParameter MC_ReadParameter reads a value of a specific axis parameter.
MC_WriteParameter MC_WriteParameter writes a value to a specific parameter.
MC_ReadBoolParameter
MC_ReadBoolParameter reads the value of a specific Boolean
parameter.
MC_WriteBoolParameter
MC_WriteBoolParameter writes a Boolean value to a specific
parameter.
MC_ReadActualPosition reads the current axis position.
MC_ReadActualVelocity reads the actual axis velocity value.
MC_ReadActualTorque reads the actual torque value of axis.
MC_Reset
MC_Reset clears axis-related errors so that the error memory is
available for new error messages.
MC_ReadStatus MC_ReadStatus reads the status of the specified axis.
MC_ReadAxisError MC_ReadAxisError reads the error information of axis.
MC_CamTableSelect
MC_CamTableSelect selects the cam table for use with
 Loading...
Loading...

