AX-Series Motion Controller Instructions Manual Appendix A
540
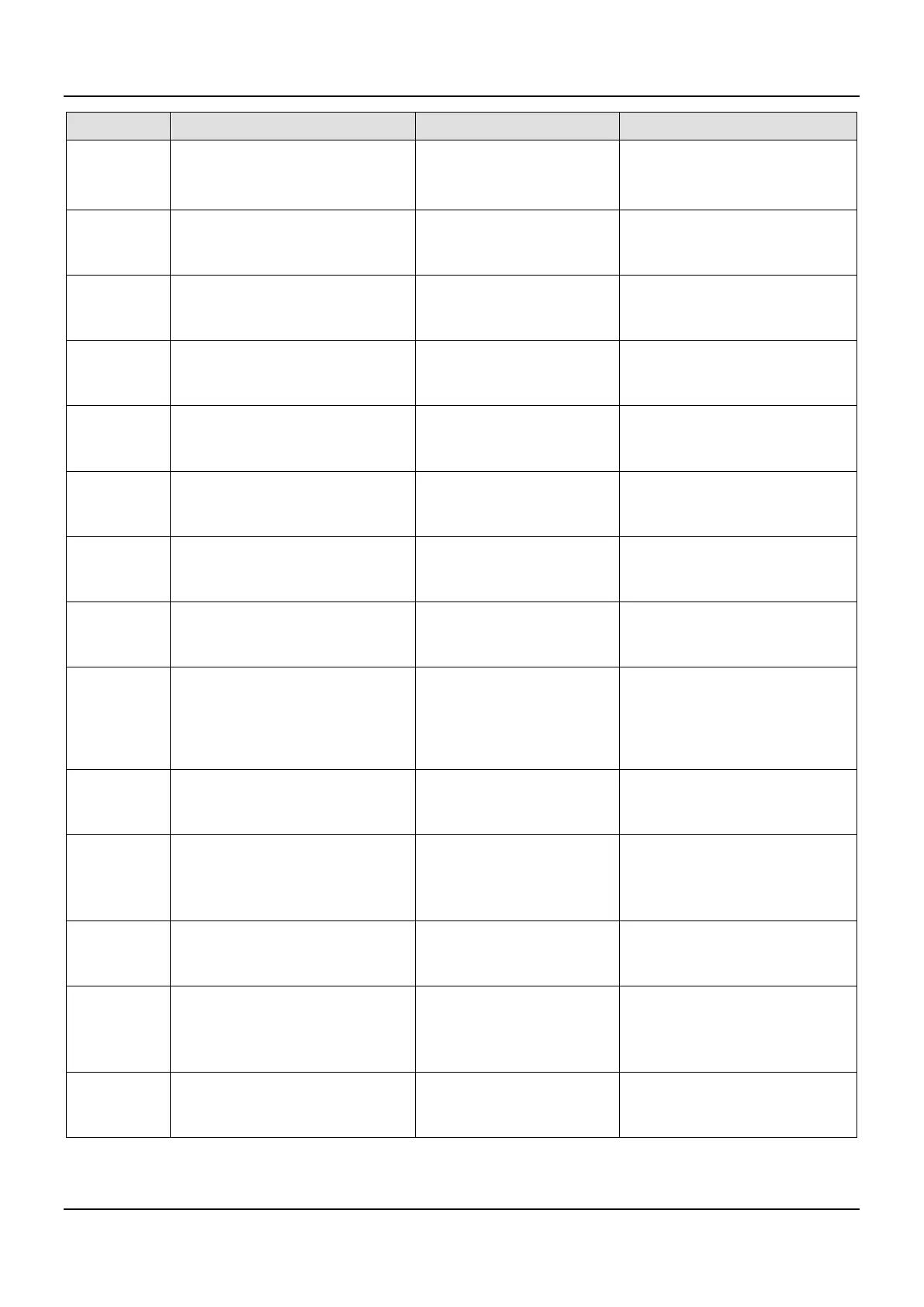
Error code Description Contents Corrective Action
0x18811 DMC_VC_SCM_NOT_SUPPORTED
Slave does not configure the
related OD on PDO.
Confirm the slave OD setting. Need
to open TargetVelocity,
ActualVelocity, ModeOfOperation,
and ModeOfOperationDisplay.
0x18812
DMC_VC_SCM_AXIS_IN_WRONG_
STATE
Axis at wrong state Use MC_Reset to eliminate the error.
0x18813 DMC_VC_SCM_INTERRUPTED Wrong function block execution Re-run the function block.
0x18814
DMC_VC_INVALID_ACCDEC_VALU
ES
Wrong value
Confirm pin input parameter value.
Re-execute the FB after modification.
0x18815
DMC_VC_DIRECTION_NOT_APPLI
CABLE
Wrong value
Confirm pin input parameter value.
Re-execute the FB after modification.
0x18816
DMC_VC_AXIS_NOT_READY_FOR_
MOTION
Wrong axis state
Power on servo, and re-run the
function block.
0x18817
DMC_VC_AXIS_ERROR_DURING_
MOTION
Axis error
Confirm servo error information.
Refer to Servo manual for error
elimination, and execute MC_Reset.
0x18818
DMC_VC_REGULATOR_OR_START
_NOT_SET
Axis error
Power on servo, execute MC_Rest,
and re-
execute motion function block.
0x18819
DMC_VC_WRONG_CONTROLLER_
MODE
Axis is in the wrong controller
mode.
Function block does not support
execution in the current mode. To
execute this function block, execute
SMC_SetControllerMode first to
switch the axis to the appropriate
0x1881A DMC_VC_INVALID_PDO_MAPPING
Slave does not configure the
related OD to PDO.
Confirm PDO configuration.
0x1881B DMC_CMGR_ZERO_VALUES Wrong value
After modifying udiInputRotation,
udiPulsePerRotation,
udiOutputRotation, and
udiUnitsPerRotation to non-zero
values, re-run the function block.
0x1881C DMC_CMGR_DRIVE_POWERED Wrong axis state
After making the axis state goes into
Disable, re-run the function block.
0x1881D DMC_CMGR_INVALID_POSPERIOD Wrong value
When setting iMovementType = 0,
set fPositionPeriod to a value greater
than 0 and less than half of
dwBusBandWidth. Then, re-run the
0x1881E
DMC_CMGR_POSPERIOD_NOT_IN
TEGRAL
Wrong value
After correcting fPositionPeriod
parameter, re-run the function block.
 Loading...
Loading...

