AX-Series Motion Controller Instructions Manual Appendix A
546
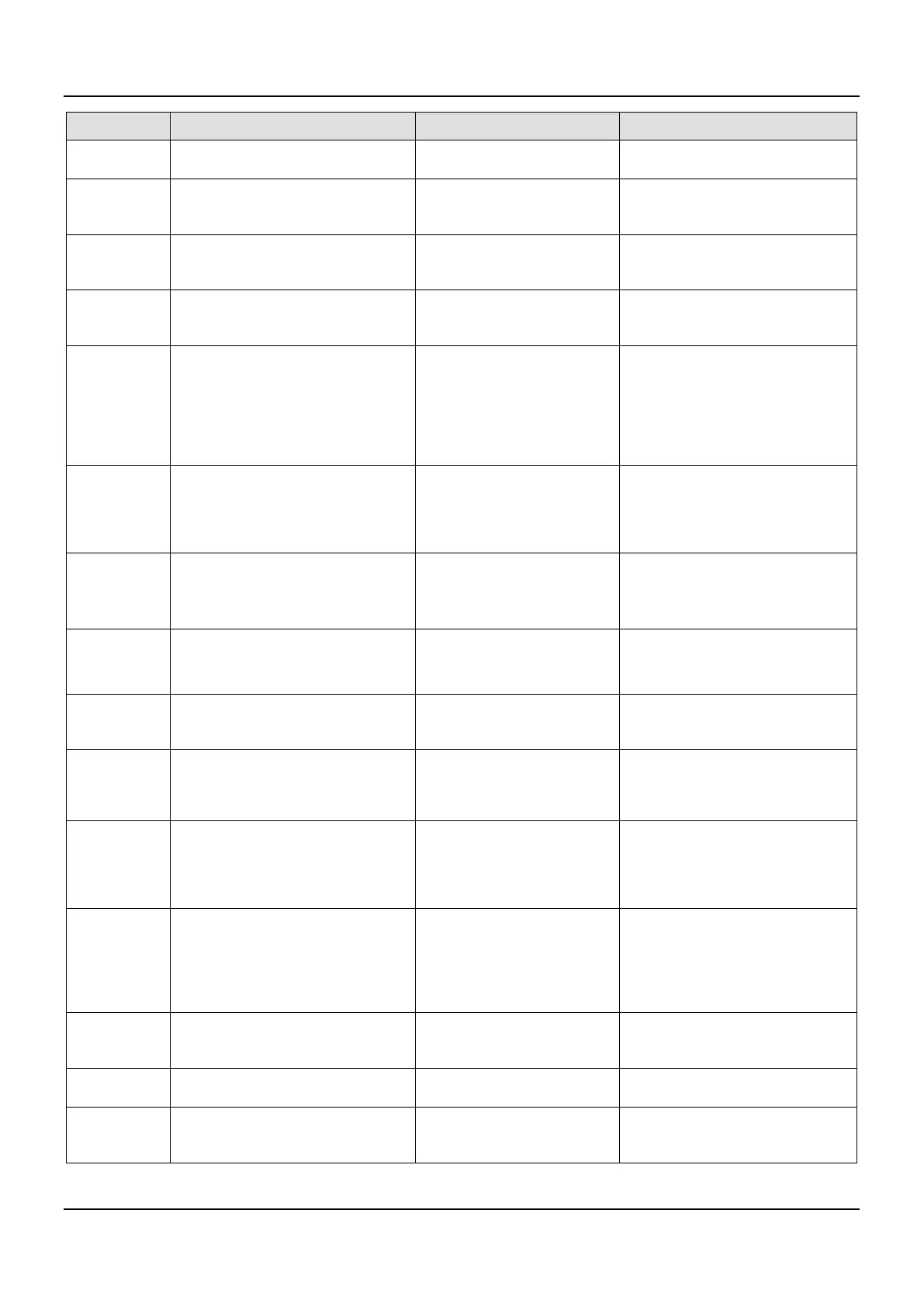
Error code Description Contents Corrective Action
0x188B6
DMC_CKPW_INVALID_
MASTERPOS
Invalid master position.
Re-execute the FB after correcting
the input of master position.
0x188B7
DMC_CKPW_INVALID_
ACC
Invalid acceleration.
Re-execute the FB after correcting
the acceleration input value of master
position.
0x188B8
DMC_CKPW_INVALID_
ACC_SETTING
Invalid acceleration setting.
Re-execute the FB after determining
the velocity, acceleration and curve
0x188B9
DMC_CKPW_INVALID_
CURVE_TYPE_SETTING
Invalid curve type setting.
The input curve type is not
supported. Re-execute the FB after
correcting the curve type.
0x188BA
DMC_CKPW_SPLINE_
HAS_NO_BOUNDARY
Spine has no boundary.
Make sure there’s boundary condition
(Nature or Clamp) set for the
previous and the latter part of the
selected curve “Spline”, which the
condition should be the same at the
start and end of the boundary. Then
0x188BB
DMC_CKPW_CAM_IS_
WRITING_BY_OTHER_
FUNCTION
Failure to write CAM.
Check if the cam table you’re
currently using is being written by
other FBs, then wait for the writing
completed before you re-execute the
0x188C5
DMC_HP_INVALID_
HOME_SPEED
Invalid home speed value.
set “Search for switch” and “Search
for Z phase pulse” with non-zero
values for the home speed setting on
Pulse Axis configuration page.
0x188C6
DMC_HP_INVALID_
HOME_ACC_DEC
Invalid home acceleration or
deceleration value.
set the homing acceleration and
deceleration with non-zero values on
Pulse Axis configuration page.
0x188C7
DMC_HP_INVALID_
HOME_POSITION
Invalid Setting Value of home
position.
Set “lrPosiotion” to be in the rotary
range of pulse axis. [0 ~
0x188C8
DMC_HP_AXIS_NOT_
PULSEAXIS
The input variable type is not
set to be PulseAxis_REF.
After select “Pulse Axis” in IO
Configuration, enter the IEC Object
variable to the input “Axis” of FB
0x188C9
DMC_HP_HOMING_
METHOD_RESERVED
Homing method is not
supported by current version.
Check if the homing method is
supported by the version you’re
currently using. refer to the
specification document for mode
modification.
0x188CA
DMC_HP_HOMING_
MOVEMENT_HW_LIMIT
Positive or negative limit signal
is activated and axis cannot
perform homing in this
circumstances.
Check if the hardware limit signal
you’re using is supported by the
current homing mode. refer to the
specification document for changing
the mode and hardware limit signal
configuration.
0x188CB
DMC_HP_HOMING_AXIS_STATE_N
OT_STAND
Axis state is not Standstill.
Confirm that DMC_Home_P is run
when the axis state is Standstill.
0x188D5
DMC_ISP_AXIS_NOT_READY_FOR
_MOTION
Wrong axis state
Power on servo and re-run the
function block.
0x188D6
DMC_ISP_WRONG_CONTROLLER_
MODE
Wrong axis state
Switch the control mode to
SMC_position, and re-run the
 Loading...
Loading...

