AX-Series Motion Controller Instructions Manual Chapter 2
53
The calculation for axis position and meshing position on cam coordinate:
Position_Slave = SlaveScaling×CAM (MasterScaling×MasterPosition + MasterCompensation) + SlaveCompensation
Slave meshing position = 1 × CAM (2 × 321(master position while executing CamIn) + 30) + 100
= 1 × CAM (672) + 100 = 1 × CAM (312) + 100
= 36 + 100
= 136
When meshing is completed, the master position will be at 321 and the slave position is at 136.
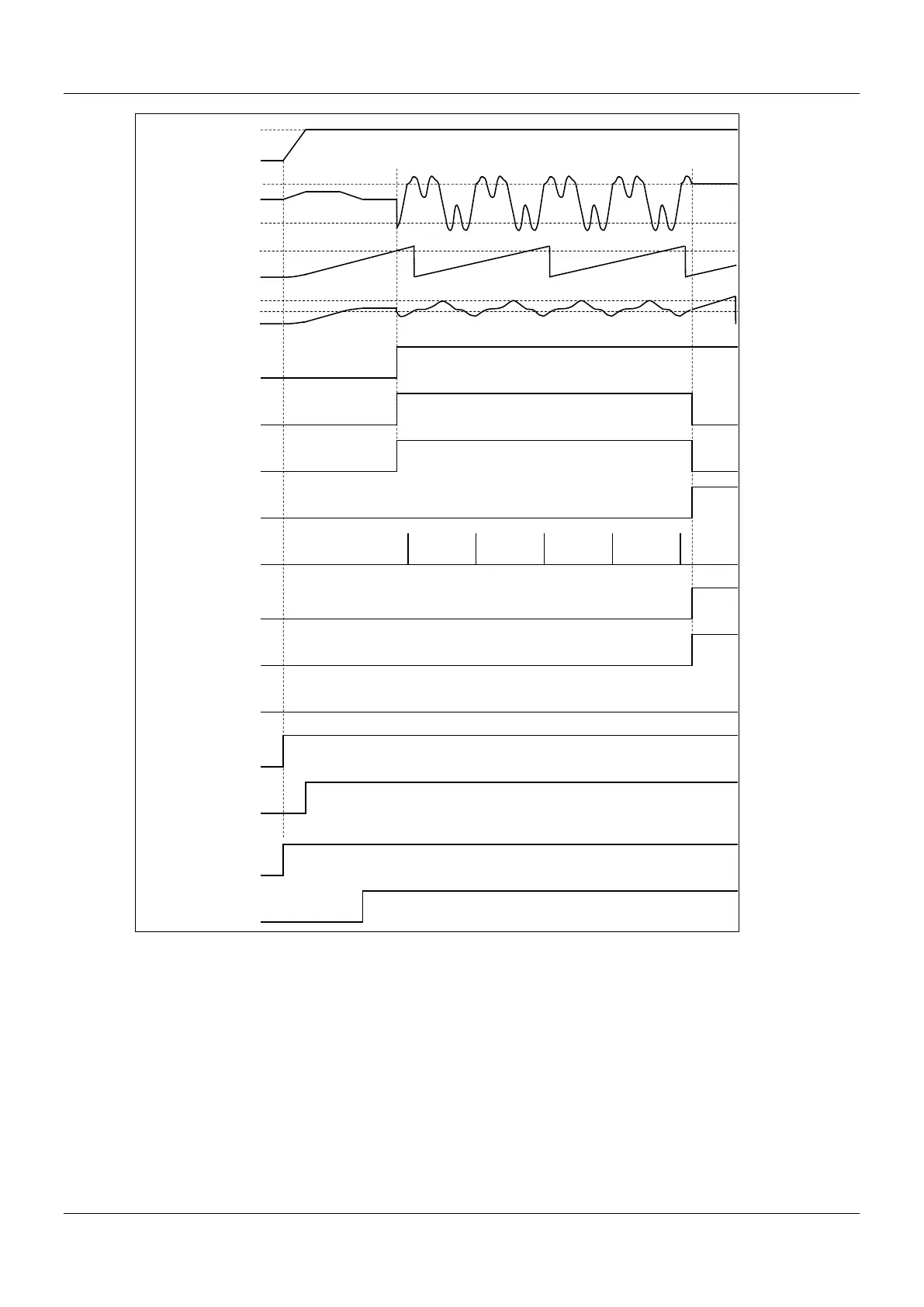
Example 2: The operation of tappet after configuring TappetHysteresis as the following example demonstrates.
Tappets
 Loading...
Loading...

