E1 Series Servo Drive Thunder Software Operation Manual Perform Test Run
HIWIN MIKROSYSTEM CORP. 5-21
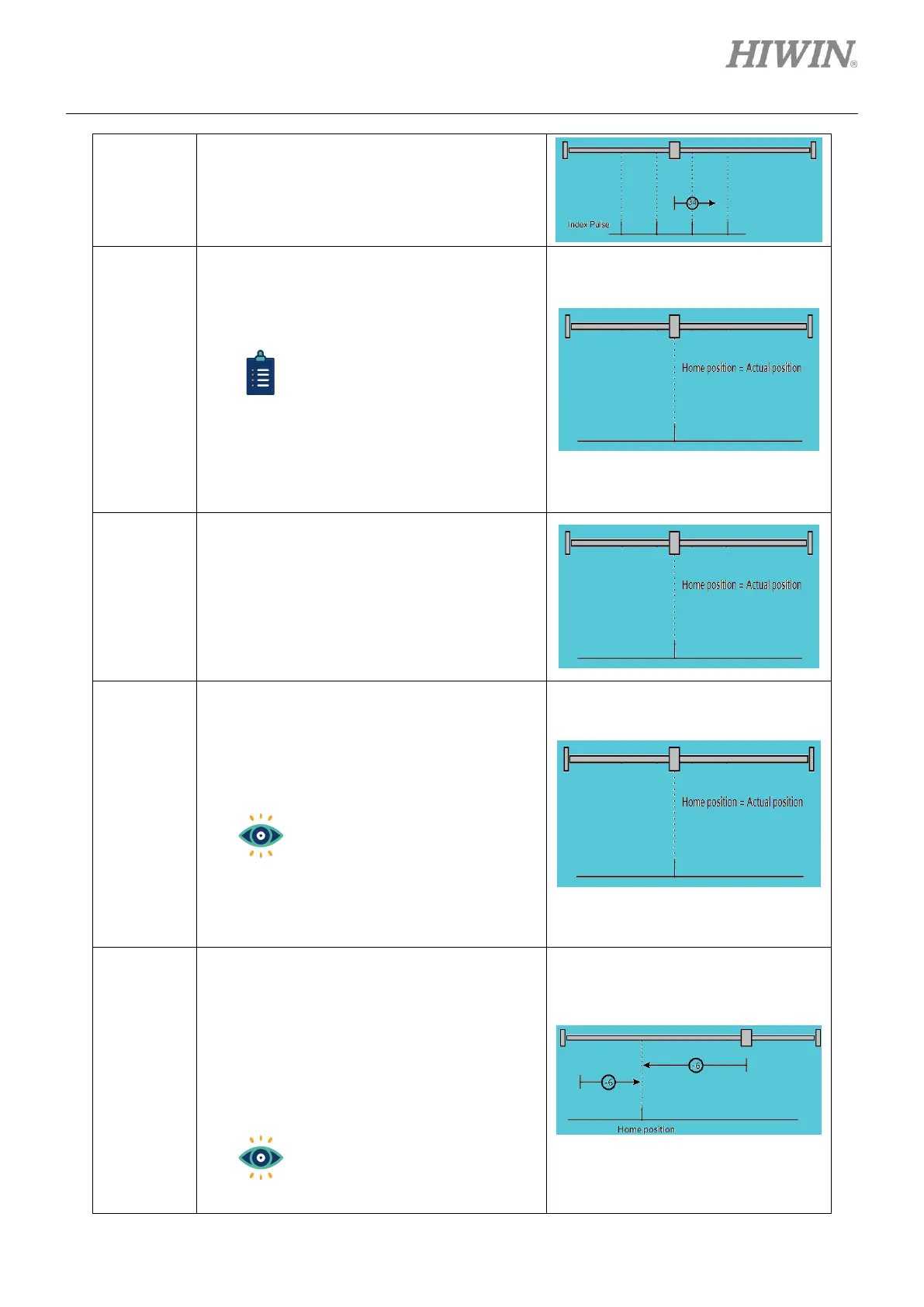
Homing with index signal from positive direction.
Search for index signal in positive direction at the
velocity for finding home position (rotary servo
motor) (Pt702).
Homing with current position. The current
position of the motor is regarded as home
position.
This homing method is the
same as homing method
37, but it is for EtherCAT
controller which does not
support CiA 402 homing
method.
Homing with current position. The current
position of the motor is regarded as home
position.
Homing with current position. The current
position of the motor is regarded as home
position. This homing method is suitable for
application using multi-turn absolute encoder.
If Pt002 = t.X is not
correctly set (refer to
chapter 15 in “E1 Series
Servo Drive User Manual”),
homing could fail.
Homing with home position. Move the motor to
the home position set by homing method -3 at the
velocity for finding near home sensor (rotary
servo motor) (Pt701). This homing method is
suitable for application using multi-turn absolute
encoder.
If Pt002 = t.X is not
correctly set (refer to
chapter 15 in “E1 Series

 Loading...
Loading...


