E1 Series Servo Drive Thunder Software Operation Manual Servo Drive Configuration
HIWIN MIKROSYSTEM CORP. 4-23
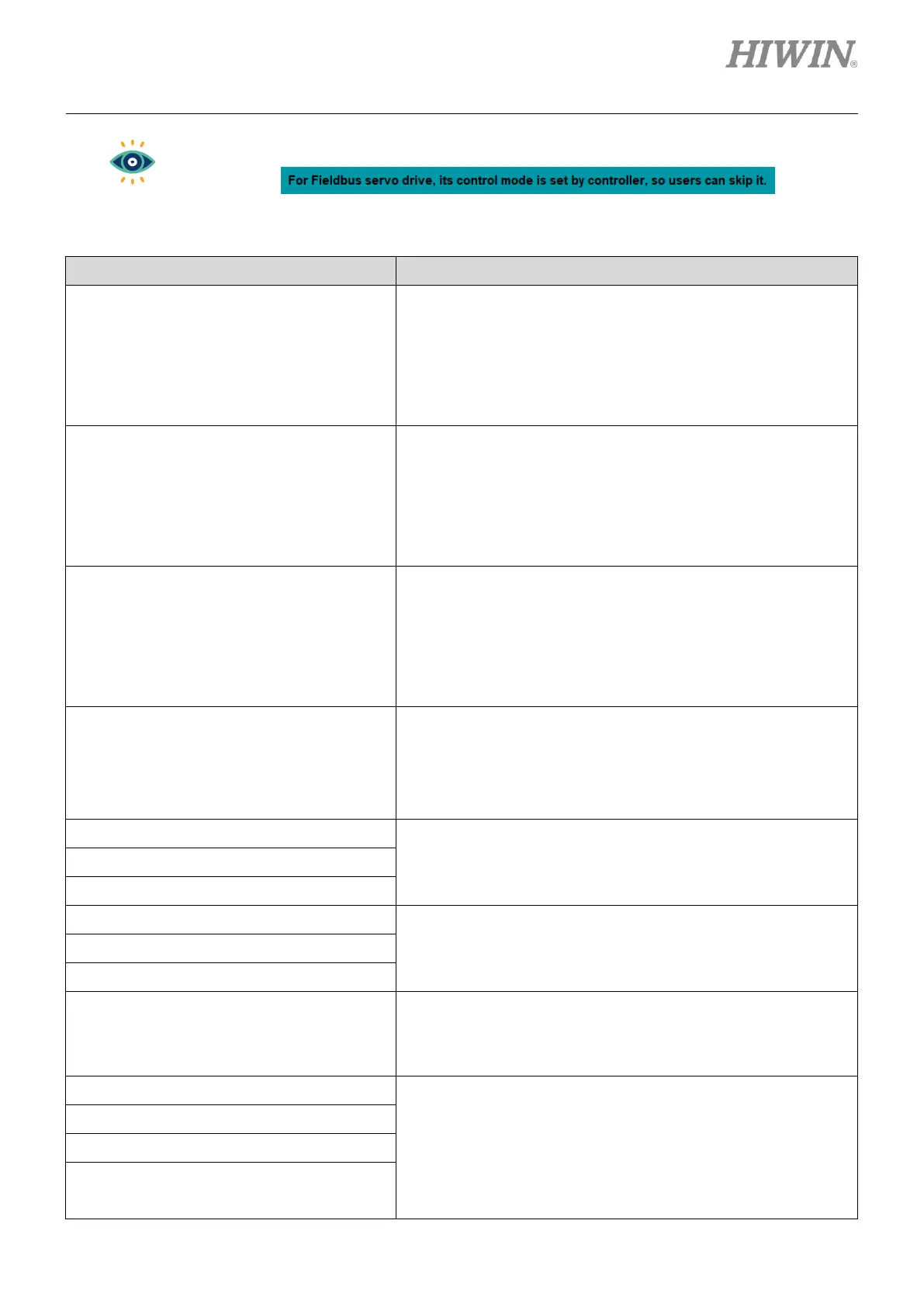
Fieldbus servo drive does not support control mode setup.
Figure 4.3.5.3
Analog voltage is used as velocity command to control motor
velocity. This control mode is suitable for:
(1) Velocity control
(2) Controller controls position loop by using the encoder pulse
outputs received from the servo drive.
Pulse commands are input into the servo drive from controller.
The position of the motor is determined by the number of pulses.
The velocity of the motor is determined by the inputting frequency
of pulses. This control mode is suitable for application which
requires positioning control.
Analog voltage is used as torque command to control motor
torque. This control mode is suitable for:
(1) Torque control (Pressing)
(2) Controller controls position and velocity loops by using the
encoder pulse outputs received from the servo drive.
3 – Internal velocity mode
Use parameters to set three internal velocity settings inside the
servo drive. Use digital input signal to switch among the velocity
settings. External analog command is not needed in this control
mode.
4 – Internal velocity mode↔Position mode
Dual mode is the combination of internal velocity mode and other
control mode. Users can switch between two control modes
according to their applications.
5 – Internal velocity mode↔Velocity mode
6 – Internal velocity mode↔Torque mode
7 – Position mode↔Velocity mode
Dual mode is the combination of any two modes of position mode,
velocity mode and torque mode. Users can switch between two
control modes according to their applications.
8 – Position mode↔Torque mode
9 – Torque mode↔Velocity mode
10 – Internal position mode
Motion procedures are set inside the servo drive. Position control
is performed by digital input signal. External pulse command is
not needed in this control mode.
11 – Internal position mode↔Position mode
Dual mode is the combination of internal position mode and other
control mode. Users can switch between two control modes
according to their applications.
12 – Internal position mode↔Velocity mode
13 – Internal position mode↔Torque mode
14 – Internal velocity mode↔Internal position
mode

 Loading...
Loading...


