895
High-speed Counter/Pulse Output Instructions Section 3-21
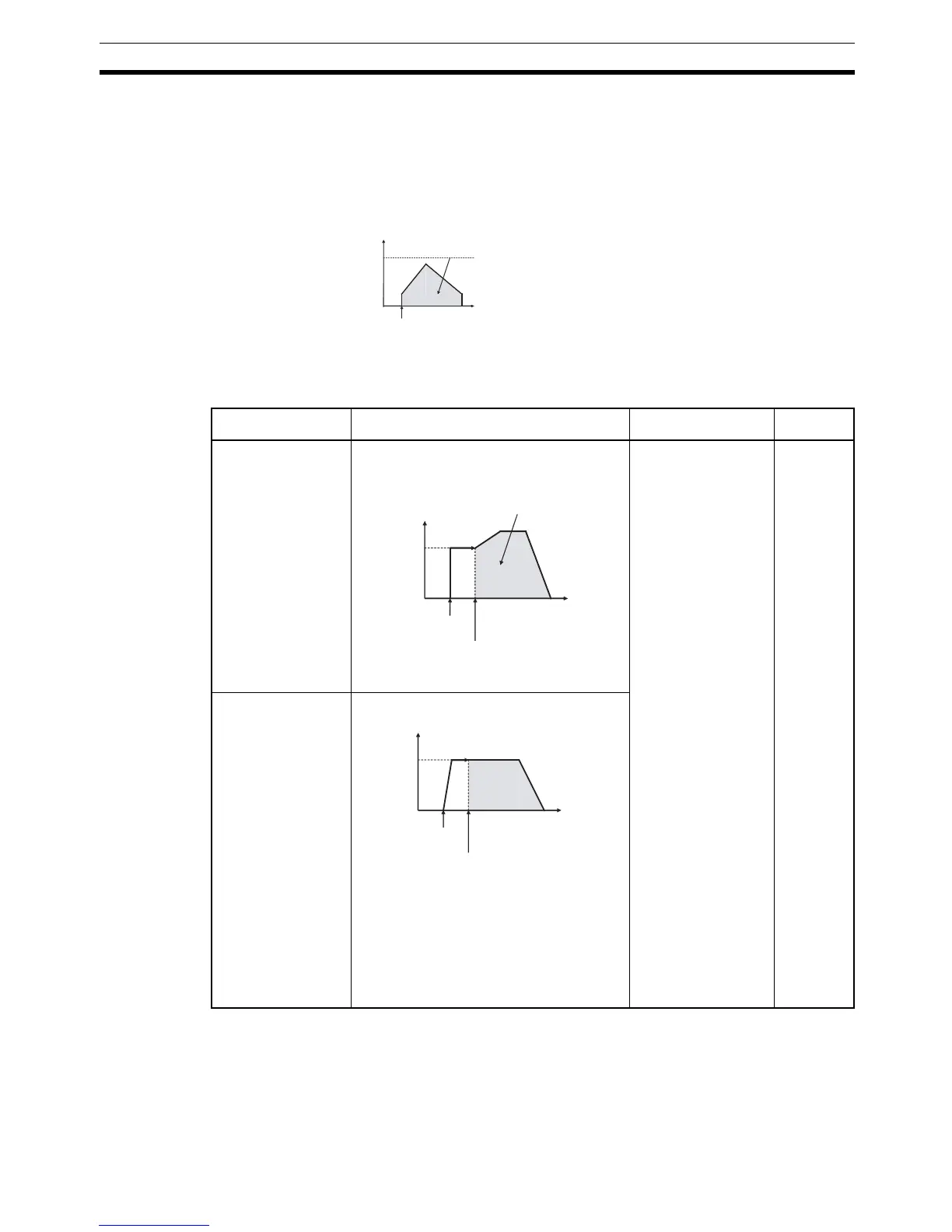
Note Triangular Control
If the specified number of pulses is less than the number required to reach the
target frequency and return to zero, the function will automatically reduce the
acceleration/deceleration time and perform triangular control (acceleration
and deceleration only.) An error will not occur.
■ Switching from Continuous Mode Speed Control to Independent Mode
Positioning
Pulse frequency
Target
frequency
Specified number
of pulses
(Specified with
PLS2(887).)
Execution of
PLS2(887)
Time
Example application Frequency changes Description Procedure/
instruction
Change from speed
control to fixed distance
positioning during oper-
ation
PLS2(887) can be exe-
cuted during a speed
control operation started
with ACC(888) to
change to positioning
operation.
ACC(888)
(Continu-
ous)
↓
PLS2(887)
Fixed distance feed
interrupt
Pulse frequency
Target
frequency
Outputs the number of
pulses specified in
PLS2(887) (Both relative
and absolute pulse
specification can be used.)
Execution of
ACC(888)
(continuous
mode)
Execution of
PLS2(887)
Time
Pulse
frequency
Present
frequency
Execution of
ACC(888)
(continuous
mode)
Execution of PLS2(887)
with the following settings
• Number of pulses = num-
ber of pulses until stop
• Relative pulse specification
• Target frequency = present
frequency
• Acceleration rate = 0001 to
07D0 hex
• Deceleration rate = target
deceleration rate
Time