Setting up Compax3 C3I22T11
254 192-120114 N5 C3I22T11 June 2008
If the drive approaches the limits of the motion range, the controller will decelera-
te so that the drive will come to a standstill within the permitted motion range. The
maximum permitted velocity is used to calculate the deceleration ramp, therefore
the drive stops even before reaching the range limits and reports an error.
Please make sure that a sufficiently large movement is set for the measurement
and that it will be reduced by a high maximum permitted velocity.
The motion range monitoring is especially important during current step respon-
ses, as position as well as speed control are deactivated during the measure-
ment.
Max permitted speed
When exceeding this value, an error is triggered, the controller decelerates and
reports an error.
When measuring the velocity setpoint jerk, the maximum permitted velocity is set to
twice the step height.
Setting and automatic start of the oscilloscope:
After pressing "accept entries", the parameters of the oscilloscope (such as scan-
ning time and the assignment of the individual channels) are automatically set to
default values according to the respective step value.
When starting the step function, the oscilloscope is automatically started.
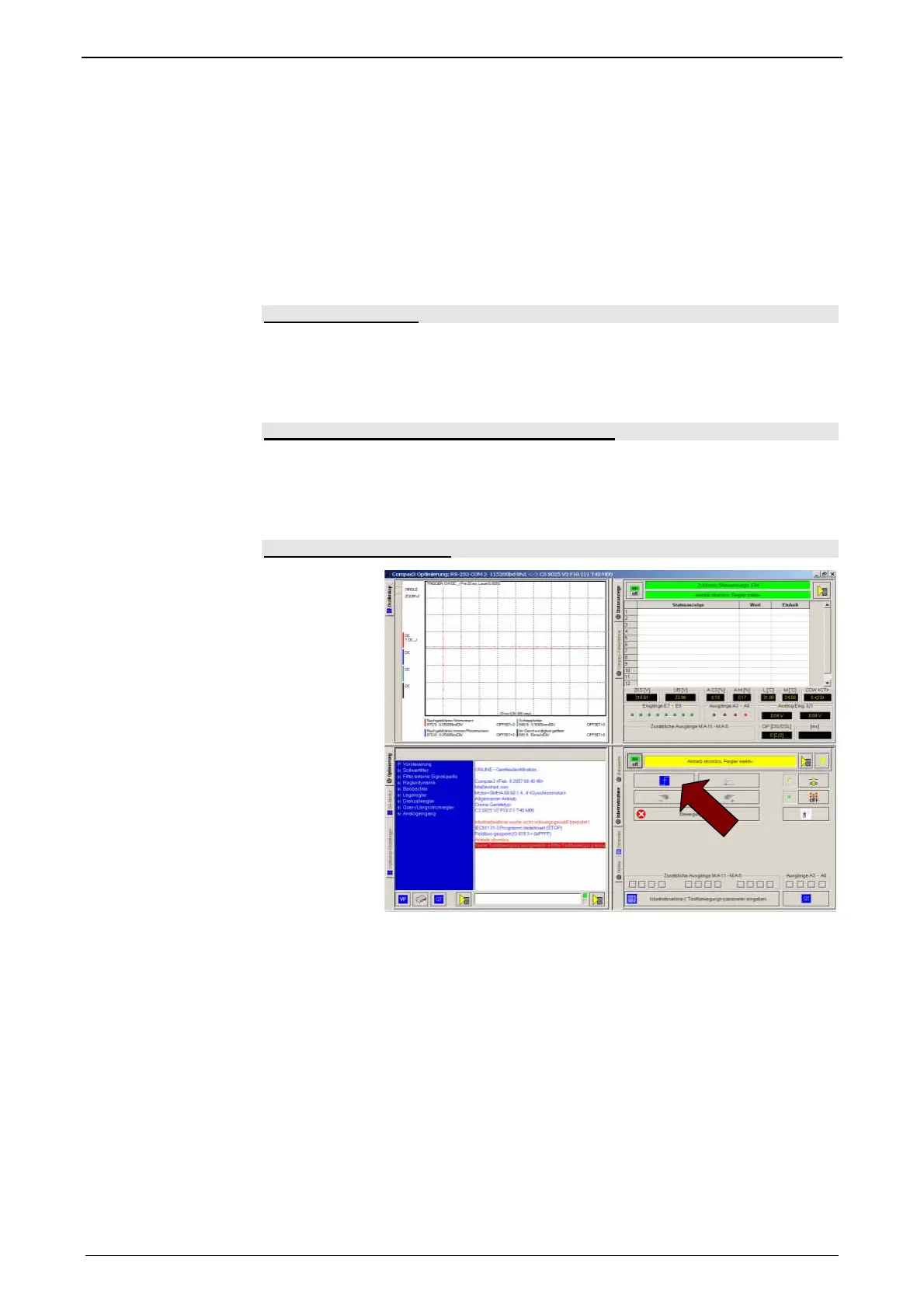
Start of the measurement
The start of the step function is made with the aid of the highlighted button.

 Loading...
Loading...










