Parker EME
Setting up Compax3
192-120114 N5 C3I22T11 June 2008 263
The signal range is reduced so that approximately linear conditions are valid. The
results of the measurement will then display the dynamic behavior at the working
point.
Example cam drive:
If the drive moves considerably (e.g. 180°) during the measurement, the behavior
of the system will change greatly over this range => caused by non-linearities in the
signal range.
An inexact measurement is the result.
If the excitation is reduced so that the drive will move only by a few degrees, the
behavior of the system at this working point will be approximately constant.
An exact measurement is the result.
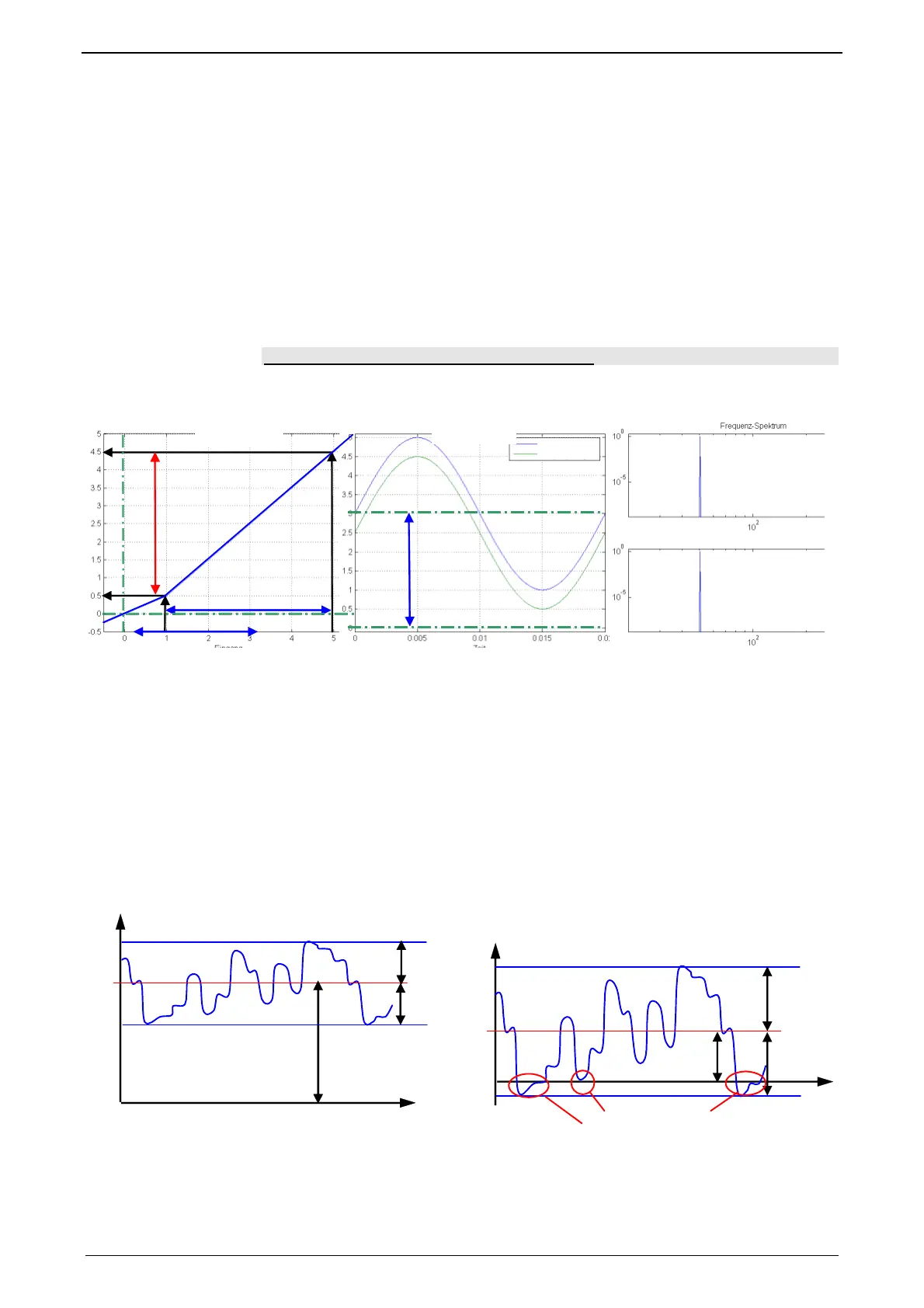
Shifting the working point into a linear range
Signal amplitude large with offset => no non-linearity in the signal range
Spectrum
Output Signal
Input Signal
System
Signals
Offset
Offset
Input Signal
Output Signal
Input Signal
Output Signal
For this, the signal range is shifted so that approximately linear conditions are valid
=> the results of the measurement show the dynamic behavior at the working point.
Example rubbing caused by friction:
In systems subject to a distinct transition between rubbing caused by friction and
sliding friction, the rubbing force will reduce abuptly as soon as the drive is moved
(v>0). With a motor at standstill, the excitation signal will cause a multiple passing
through the range of rubbing friction during measurement. Due to the non-linearity
in the signal range, the resulting measurement will be inexact.
If the drive moves, however, fast enough during the measurement, so that the
speed will not become zero during the measurement, the system remains in sliding
friction and a precise measurement can be obtained.
Optimal measurement with rubbing friction
v
t
v
test move
±V
stimulatio
v
test move
±V
stimulation
v
t
static friction
V
test move
: Speed of the test movement
V
stimulation
: Speed of the excitation signal

 Loading...
Loading...










