Parker EME
Specifications
192-120114 N5 C3I22T11 June 2008 399
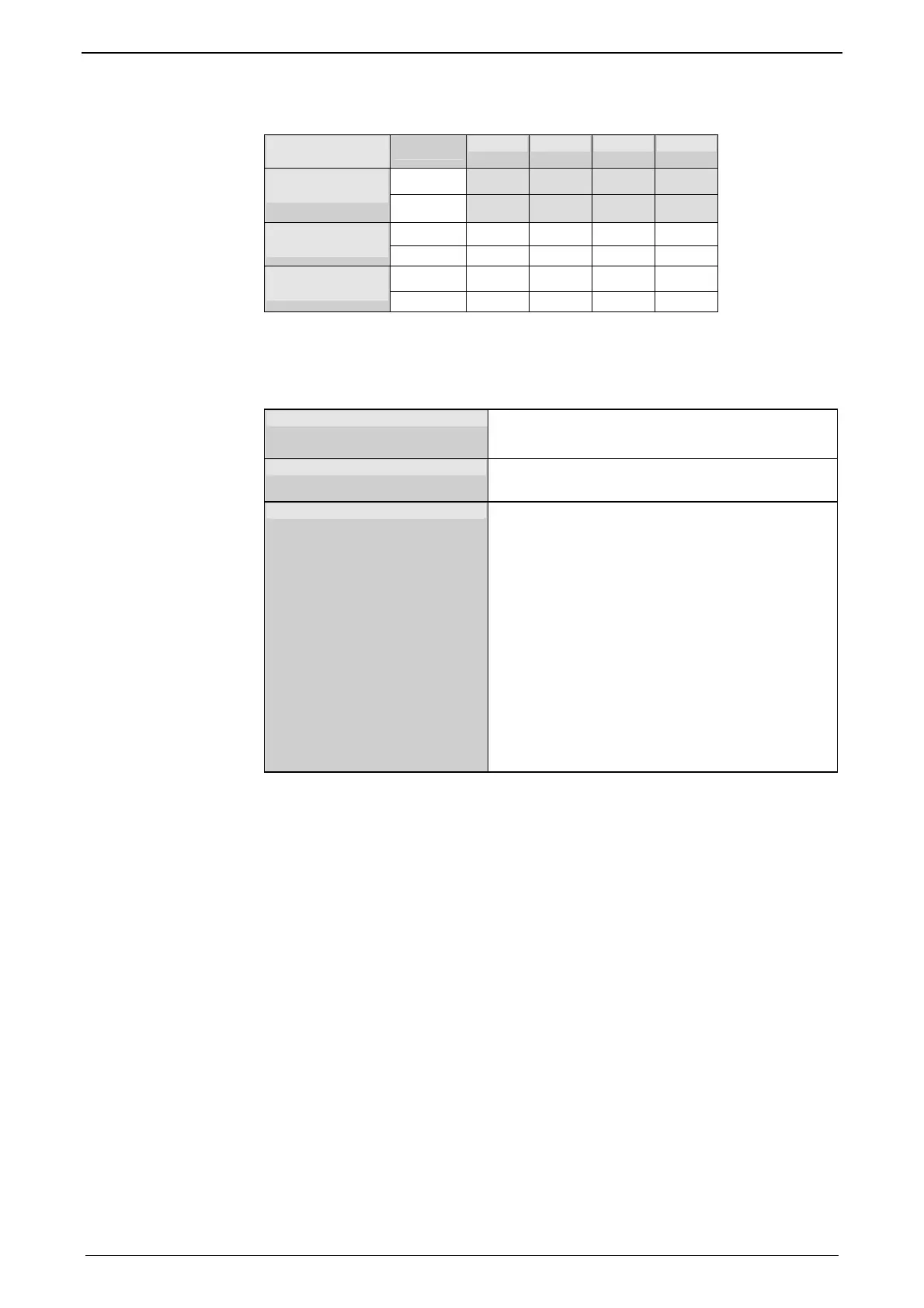
Compax3HxxxV4 at 3*480VAC
Switching fre-
quency*
H050V4 H090V4 H125V4 H155V4
I
nominal
43A
eff
85A
eff
110A
eff
132A
eff
8kHz
I
peak
(<5s) 64.5A
eff
127.5A
eff
165A
eff
198A
eff
I
nominal
27A
eff
70A
eff
70A
eff
84A
eff
16kHz
I
peak
(<5s) 40.5A
eff
105A
eff
105A
eff
126A
eff
I
nominal
16A
eff
40A
eff
40A
eff
48A
eff
32kHz
I
peak
(<5s) 24A
eff
60A
eff
60A
eff
72A
eff
The values marked with grey are the pre-set values (standard values)!
*corresponds to the frequency of the motor current
Resolution of the motor position
For option F10: Resolver
Position resolution: 16Bit (= 0.005°)
Absolute accuracy: ±0,167°
For option F11: SinCos
©
Position resolution: 13.5Bit/Encoder sine period
=> 0.03107°/encoder resolution
For option F12:
Maximum position resolution
Linear: 24 Bits per motor magnet spacing
Rotary: 24 bits per motor revolution
Resolution for analog hall sensors with
1Vss signal (e.g. EnDat):
13.5 bits / graduation of the scale of the enco-
der
For RS 422 encoders: 4x encoder resolution
Accuracy of the feedback zero pulse acquisition
=
accuracy of the feedback resolution
Resolution for analog hall sensors with 1Vss
signal: 13.5 bits / motor magnet spacing
Precision
The exactitude of the position signal is above all determined by the exactitude of
the feedback system used.

 Loading...
Loading...










