u-blox ZED-F9P Interface Description - Manual
Advance Information
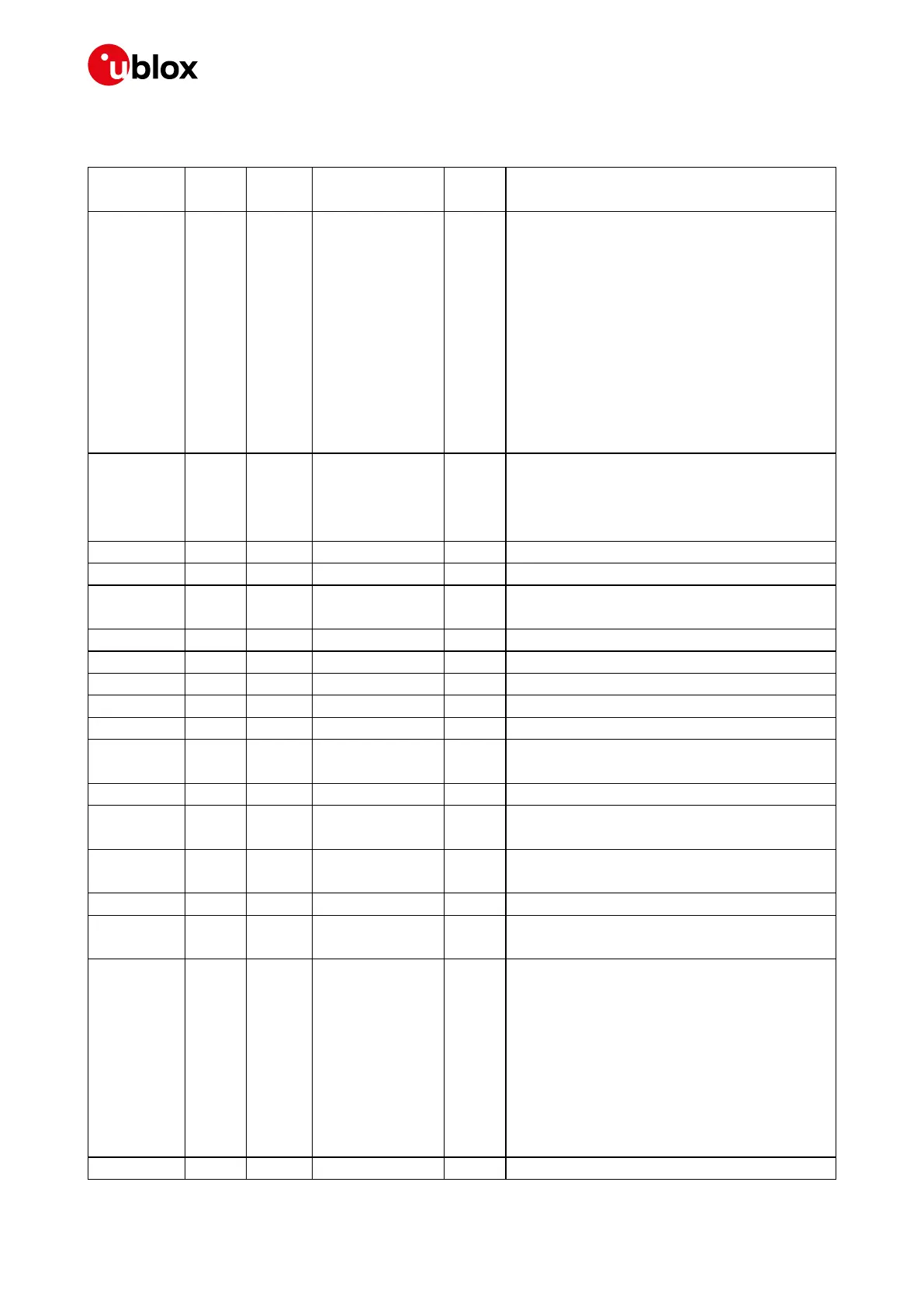
CFG-NAV5 continued
Byte Offset Number
Format
Scaling Name Unit Description
2 U1 - dynModel - Dynamic platform model:
0: portable
2: stationary
3: pedestrian
4: automotive
5: sea
6: airborne with <1g acceleration
7: airborne with <2g acceleration
8: airborne with <4g acceleration
9: wrist worn watch
10: bike
3 U1 - fixMode - Position Fixing Mode:
1: 2D only
2: 3D only
3: auto 2D/3D
4 I4 0.01 fixedAlt m Fixed altitude (mean sea level) for 2D fix mode.
8 U4 0.0001 fixedAltVar m^2 Fixed altitude variance for 2D mode.
12 I1 - minElev deg Minimum Elevation for a GNSS satellite to be
used in NAV
13 U1 - drLimit s Reserved
14 U2 0.1 pDop - Position DOP Mask to use
16 U2 0.1 tDop - Time DOP Mask to use
18 U2 - pAcc m Position Accuracy Mask
20 U2 - tAcc m Time Accuracy Mask
22 U1 - staticHoldThr
esh
cm/s Static hold threshold
23 U1 - dgnssTimeout s DGNSS timeout
24 U1 - cnoThreshNumS
Vs
- Number of satellites required to have C/N0
above cnoThresh for a fix to be attempted
25 U1 - cnoThresh dBHz C/N0 threshold for deciding whether to attempt
a fix
26 U1[2] - reserved1 - Reserved
28 U2 - staticHoldMax
Dist
m Static hold distance threshold (before quitting
static hold)
30 U1 - utcStandard - UTC standard to be used:
0: Automatic; receiver selects based on GNSS
configuration (see GNSS time bases).
3: UTC as operated by the U.S. Naval
Observatory (USNO); derived from GPS time
6: UTC as operated by the former Soviet Union;
derived from GLONASS time
7: UTC as operated by the National Time Service
Center, China; derived from BeiDou time
31 U1[5] - reserved2 - Reserved
UBX-18010854 - R04 Advance Information Page 55 of 259
 Loading...
Loading...






