u-blox ZED-F9P Interface Description - Manual
Advance Information
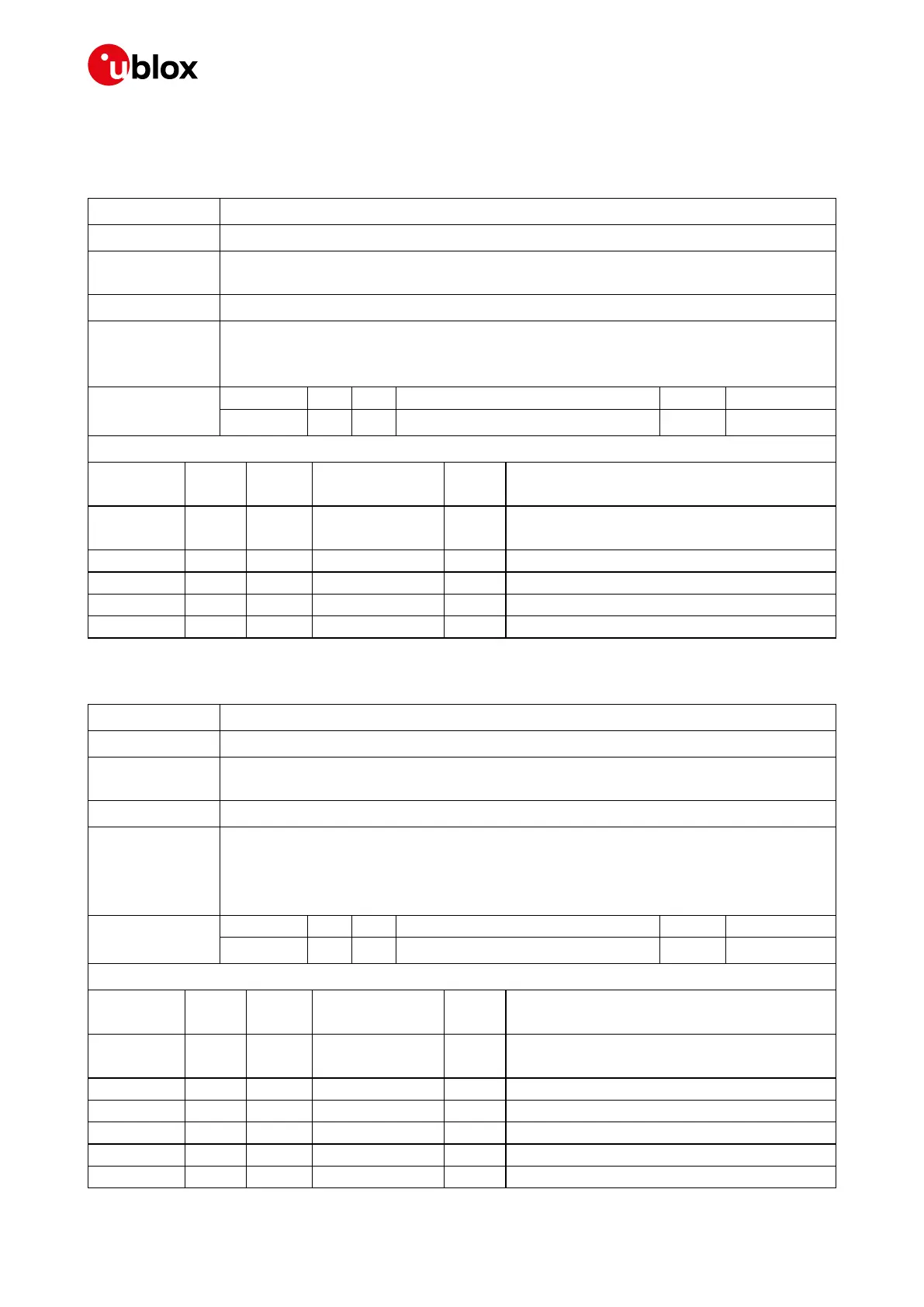
5.14.9 UBX-NAV-POSECEF (0x01 0x01)
5.14.9.1 Position Solution in ECEF
Message
UBX-NAV-POSECEF
Description
Position Solution in ECEF
Firmware
Supported on:
• u-blox 9 with protocol version 27
Type
Periodic/Polled
Comment
See important comments concerning validity of position given in section
Navigation Output Filters.
-
Header Class ID Length (Bytes) Payload Checksum
Message Structure
0xB5 0x62 0x01 0x01 20
see below
CK_A CK_B
Payload Contents:
Byte Offset Number
Format
Scaling Name Unit Description
0 U4 - iTOW ms GPS time of week of the navigation epoch.
See the description of iTOW for details.
4 I4 - ecefX cm ECEF X coordinate
8 I4 - ecefY cm ECEF Y coordinate
12 I4 - ecefZ cm ECEF Z coordinate
16 U4 - pAcc cm Position Accuracy Estimate
5.14.10 UBX-NAV-POSLLH (0x01 0x02)
5.14.10.1 Geodetic Position Solution
Message
UBX-NAV-POSLLH
Description
Geodetic Position Solution
Firmware
Supported on:
• u-blox 9 with protocol version 27
Type
Periodic/Polled
Comment
See important comments concerning validity of position given in section
Navigation Output Filters.
This message outputs the Geodetic position in the currently selected ellipsoid. The default is
the WGS84 Ellipsoid, but can be changed with the message UBX-CFG-DAT.
Header Class ID Length (Bytes) Payload Checksum
Message Structure
0xB5 0x62 0x01 0x02 28
see below
CK_A CK_B
Payload Contents:
Byte Offset Number
Format
Scaling Name Unit Description
0 U4 - iTOW ms GPS time of week of the navigation epoch.
See the description of iTOW for details.
4 I4 1e-7 lon deg Longitude
8 I4 1e-7 lat deg Latitude
12 I4 - height mm Height above ellipsoid
16 I4 - hMSL mm Height above mean sea level
20 U4 - hAcc mm Horizontal accuracy estimate
UBX-18010854 - R04 Advance Information Page 149 of 259
 Loading...
Loading...






