u-blox ZED-F9P Interface Description - Manual
Advance Information
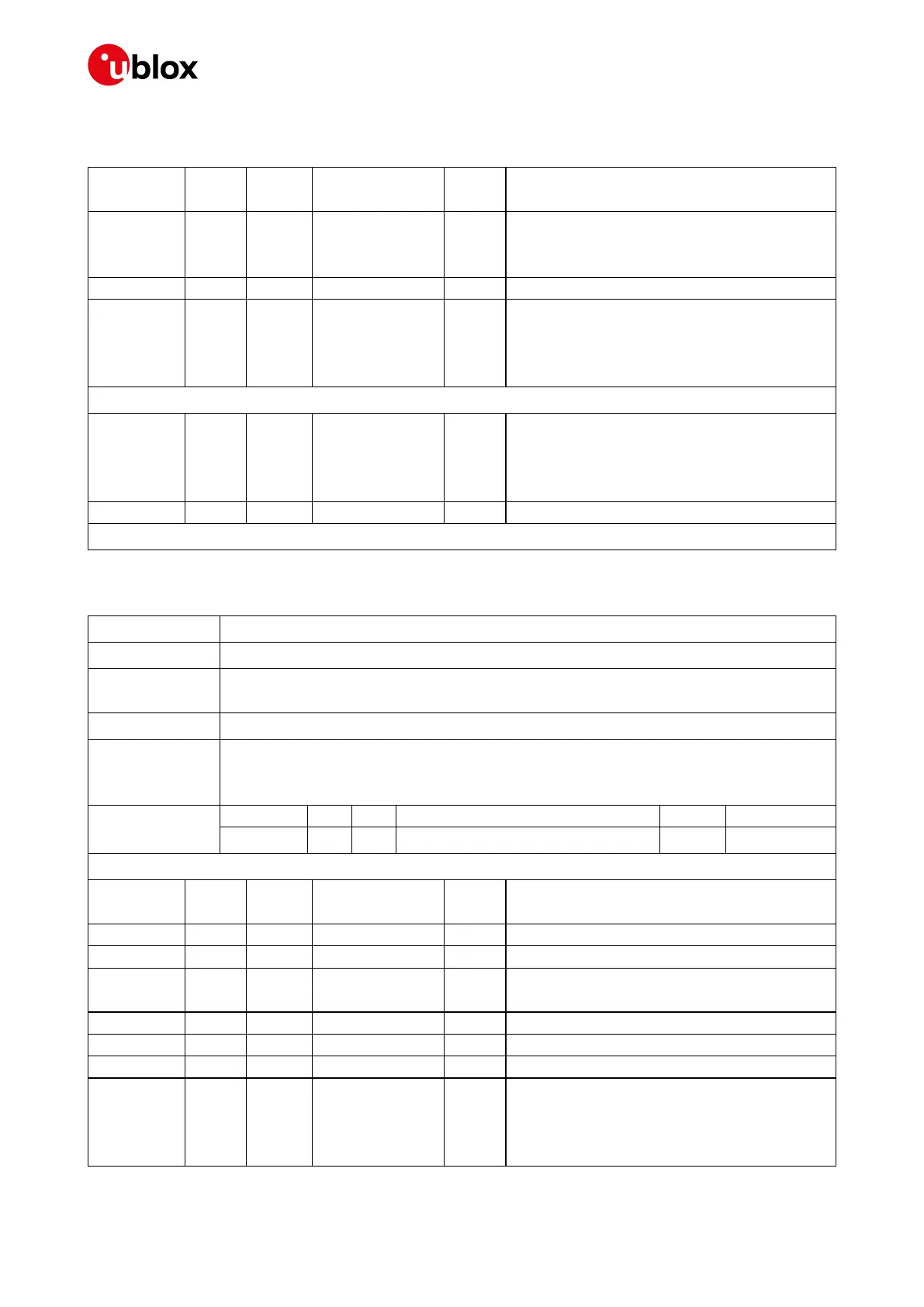
NAV-GEOFENCE continued
Byte Offset Number
Format
Scaling Name Unit Description
5 U1 - status - Geofencing status
0 - Geofencing not available or not reliable
1 - Geofencing active
6 U1 - numFences - Number of geofences
7 U1 - combState - Combined (logical OR) state of all geofences
0 - Unknown
1 - Inside
2 - Outside
Start of repeated block (numFences times)
8 + 2*N U1 - state - Geofence state
0 - Unknown
1 - Inside
2 - Outside
9 + 2*N U1[1] - reserved1 - Reserved
End of repeated block
5.14.5 UBX-NAV-HPPOSECEF (0x01 0x13)
5.14.5.1 High Precision Position Solution in ECEF
Message
UBX-NAV-HPPOSECEF
Description
High Precision Position Solution in ECEF
Firmware
Supported on:
• u-blox 9 with protocol version 27
Type
Periodic/Polled
Comment
See important comments concerning validity of position given in section
Navigation Output Filters.
-
Header Class ID Length (Bytes) Payload Checksum
Message Structure
0xB5 0x62 0x01 0x13 28
see below
CK_A CK_B
Payload Contents:
Byte Offset Number
Format
Scaling Name Unit Description
0 U1 - version - Message version (0 for this version)
1 U1[3] - reserved1 - Reserved
4 U4 - iTOW ms GPS time of week of the navigation epoch.
See the description of iTOW for details.
8 I4 - ecefX cm ECEF X coordinate
12 I4 - ecefY cm ECEF Y coordinate
16 I4 - ecefZ cm ECEF Z coordinate
20 I1 0.1 ecefXHp mm High precision component of ECEF X
coordinate. Must be in the range of -99..+99.
Precise coordinate in cm = ecefX + (ecefXHp *
1e-2).
UBX-18010854 - R04 Advance Information Page 143 of 259
 Loading...
Loading...






