STwrench User Guide Pset
9836 4134 01 Edition 2.9 127 (326)
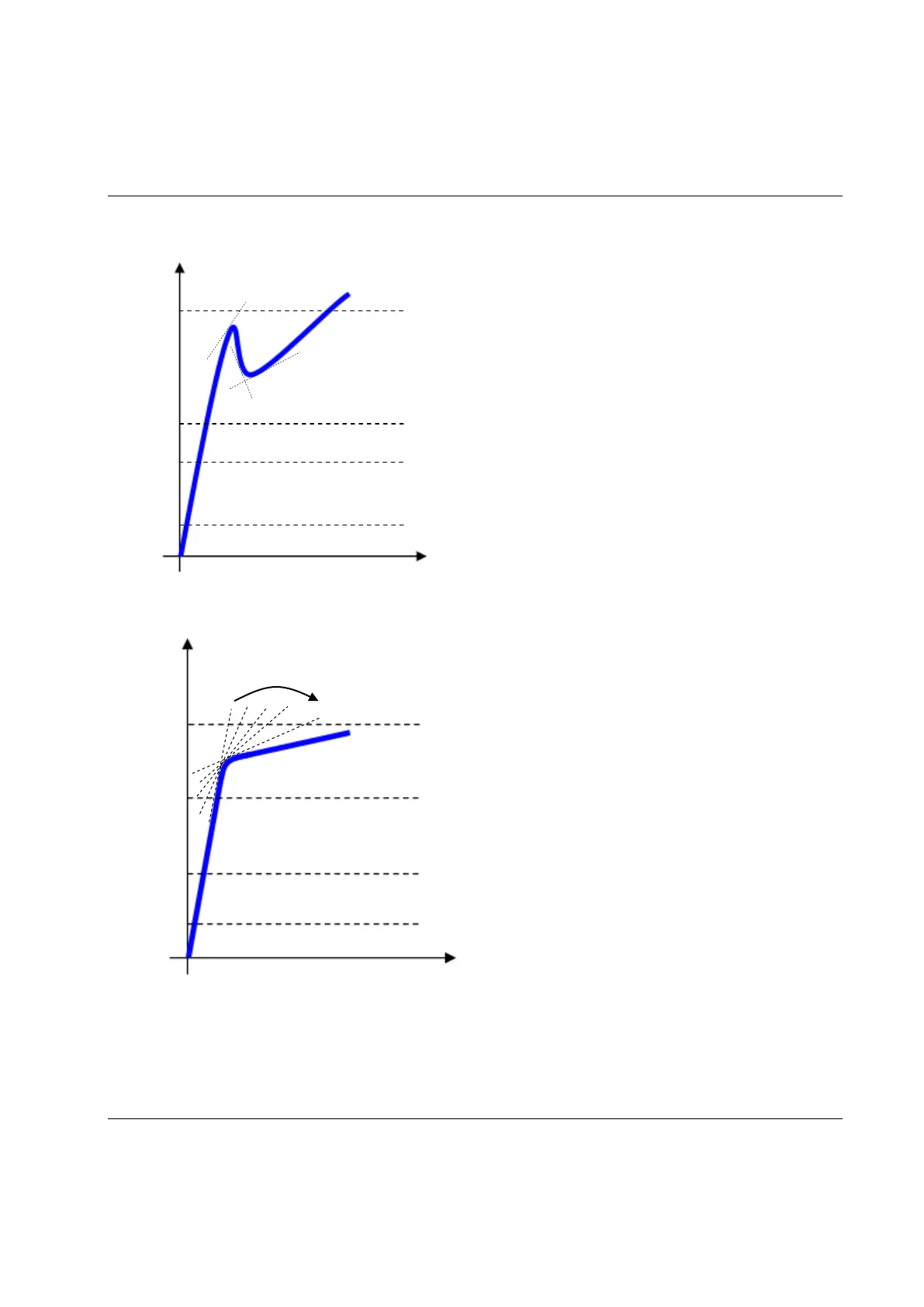
CASE A:
Sometimes very high static friction is built into the joint
(for instance, for no lubrication, conical seat). In that
case, as soon as the bolt moves, the torque decreases and
the real residual torque is lower than the peak torque
necessary to overcome the static friction.
The STwrench algorithm monitors the α
average
; if it goes
to a negative value, it waits until the α
average
goes back to
a positive value.
The point in which the α
average
goes back to a positive
value is considered as the residual torque.
CASE B:
Normally during breakaway, there is a rapid change
of the gradient of the torque/time function when the
bolt starts moving.
The STwrench algorithm monitors the last 14
values α
average
: If all of them are decreasing, and the
last one is less than the 40% of the first one, the
breakaway/residual point is detected.
NOTE: When the algorithm detects the breakaway,
it still waits for 30 milliseconds in order to monitor
if the gradient goes to a negative value; in that case
the algorithm continues analyzing the torque/time
trace as described in CASE A.
How to set parameters:
- Cycle start: This is the point from where the torque is measured. Set to a low value, but
greater than the wrench minimum load.
- Torque min: Minimum residual value for having result OK.
average
> 0
average
> 0
average
< 0
Torque
Torque max
Cycle start
Start final angle

 Loading...
Loading...





