GR740-UM-DS, Nov 2017, Version 1.7 457 www.cobham.com/gaisler
GR740
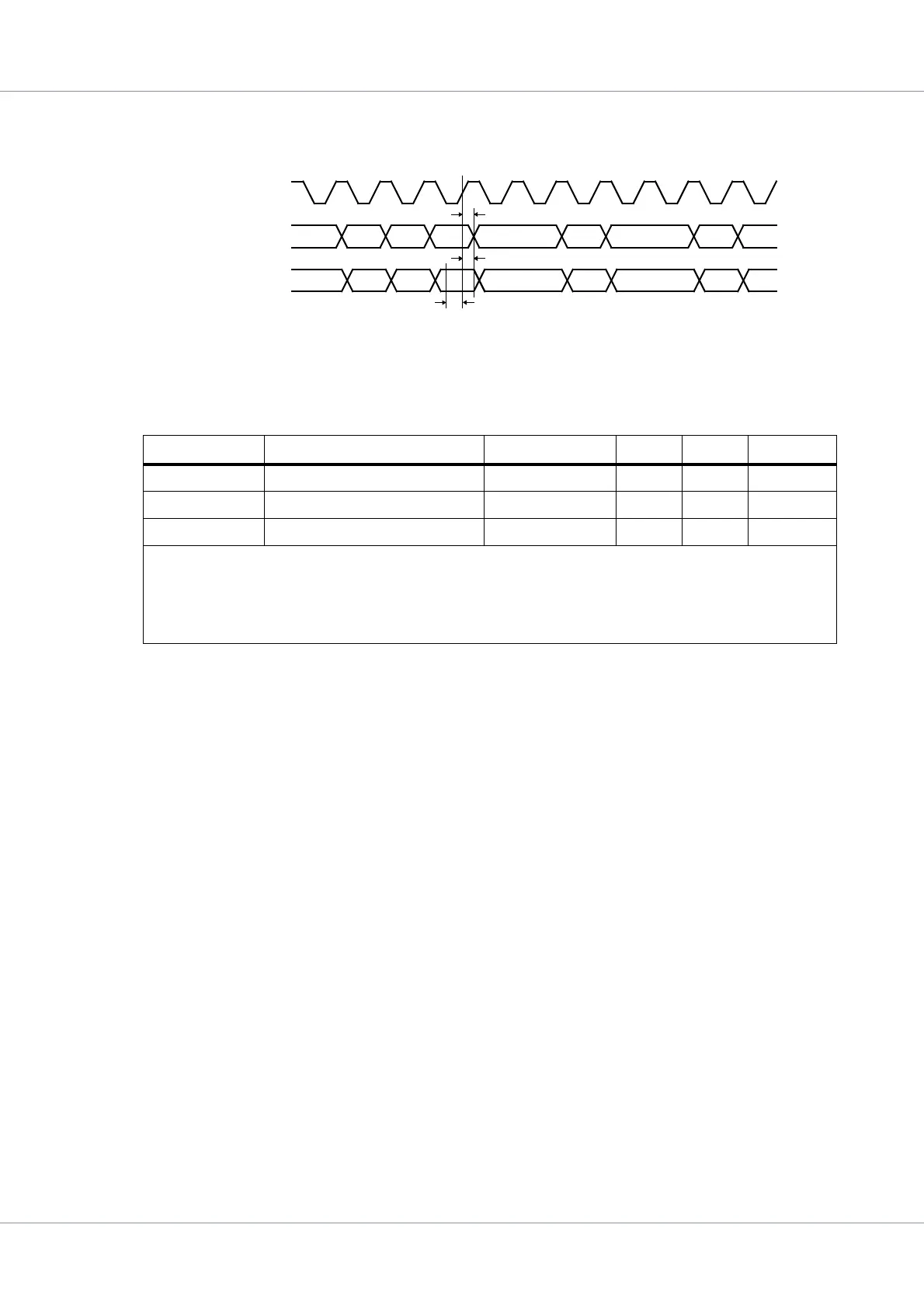
39.5.19 CAN Controller interface timing
The timing waveforms and timing parameters are shown in figure 73 and are defined in table 596.
Table 596.Timing parameters
Name Parameter Reference edge Min Max Unit
t
GRCAN0
clock to output delay rising clk edge
0
1)
40
2)
ns
t
GRCAN1
data input to clock setup
rising clk edge
3)
--
ns
t
GRCAN2
data input from clock hold
rising clk edge
3)
--ns
1)
Guaranteed by design, not tested.
2)
Verified by static timing analysis, not tested
3)
The can inputs are re-synchronized internally. The signals do not have to meet any setup or hold requirements. However,
the input to clock setup value restricts the maximum SPI frequency.
Figure 73. Timing waveforms
t
GRCAN0
cantx[]
internal sys_clk
canrx[]
t
GRCAN2
t
GRCAN1