Revision 2016/03, 6ELE, V1.14
4-37
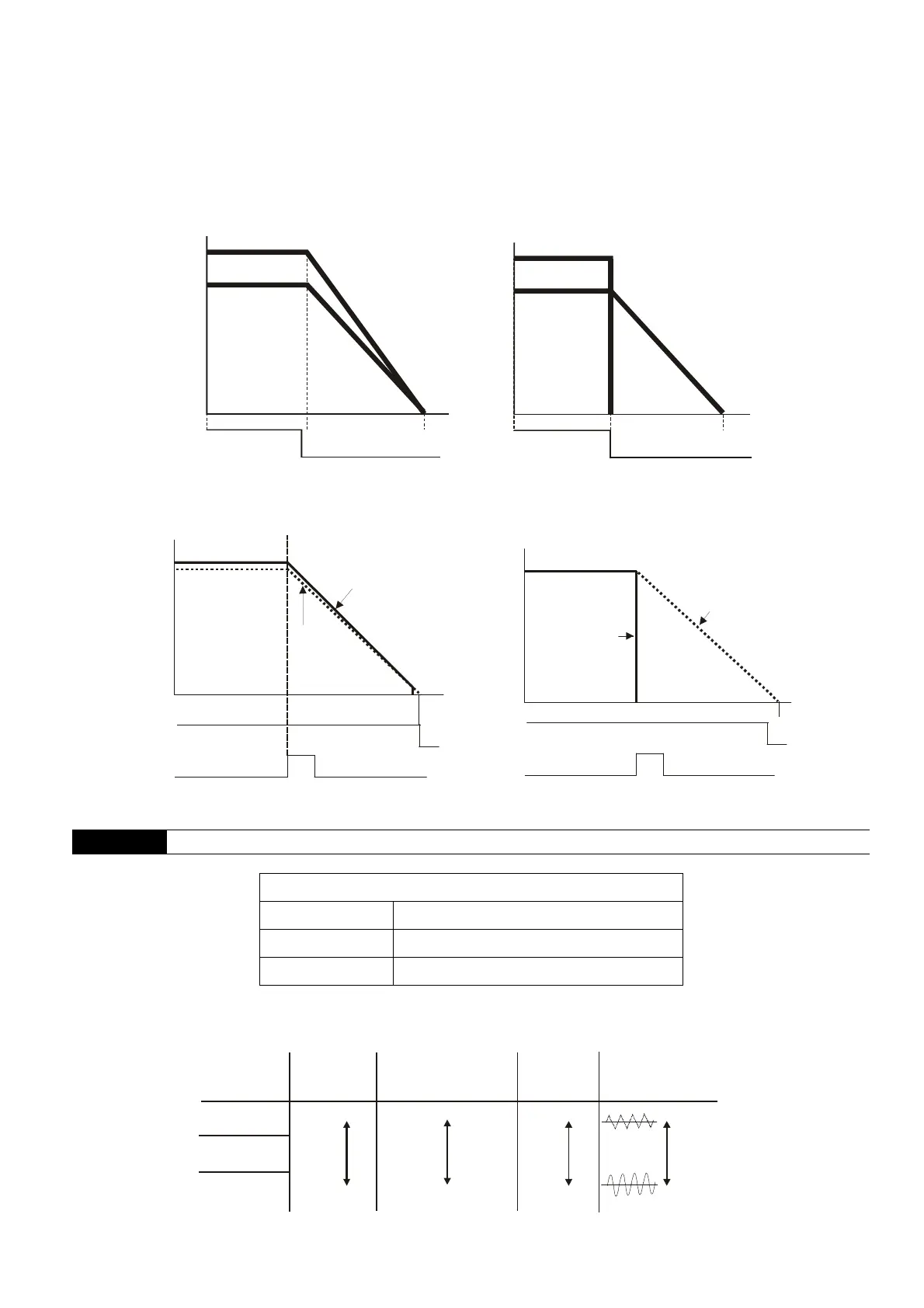
The motor stop method is usually determined by the characteristics of the motor load and how frequently it is
stopped.
(1) It is recommended to use “ramp to stop” for safety of personnel or to prevent material from being wasted in
applications where the motor has to stop after the drive is stopped. The deceleration time has to be set
accordingly.
(2) If motor free running is allowed or the load inertia is large, it is recommended to select “coast to stop”. For
example: blowers, punching machines, centrifuges and pumps.
RUN
STOP
Frequency
Time
Time
output
frequency
output
frequency
motor
speed
motor
speed
operation
command
operation
command
stops according to
decel eration time
free run to stop
ramp to stop and free run to stop
EF
frequency output
motor
speed
EF
operation
command
stops according to
decel eration time
When Pr.02.02 is set to 2 or 3
frequency
output
free run to stop
operation
command
When Pr.02.02 is set to 0 or 1
motor
speed
02.03
PWM Carrier Frequency Selections
Unit: 1
115V/230V/460V Series
Power 0.25 to 5hp (0.2kW to 3.7kW)
Setting Range 2 to 12 kHz
Factory Setting 8 kHz
This parameter determines the PWM carrier frequency of the AC motor drive.
2kHz
8kHz
12kHz
Carrier
Noise
Noise or leakage
current
Heat
Dissipation
Current
Wave
Significant
Minimal
Significant
Minimal
Minimal
Significant
Minimal
Significant