AX-Series Motion Controller Instructions Manual Chapter 2
66
2. MC_TP_REF: Structure(STRUCT).
Name Function Data Type
Setting Value (Default
Number_of_pairs
There’s no need
to set this
variable, which
has been
replaced by
INT -
IsAbsolute
Set the mode of
position.
BOOL
True: Absolute mode
False: Relative mode
(True)
MC_TP_Array
Time and
position data
during execution
ARRAY [1..100] OF SMC_TP SMC_TP*
*Note: SMC_TP: Structure(STRUCT).
Setting Value (Default Value)
delta_time
Period of time between
TIME Positive or 0(TIME#0ms)
position
Position of the position
LREAL Negative, positive or 0(0)
Function
MC_PositionProfile carries out motion profile with time and position according to the user-defined data in TimePosition
variables, the state is Discrete Motion during the movement.
MC_MoveSuperimposed will not be able to function while MC_PositionProfile is being used.
Troubleshooting
If an error occurs during the execution of the instruction, Error will change to True. You can refer to ErrorID (Error
Code) to address the problem.
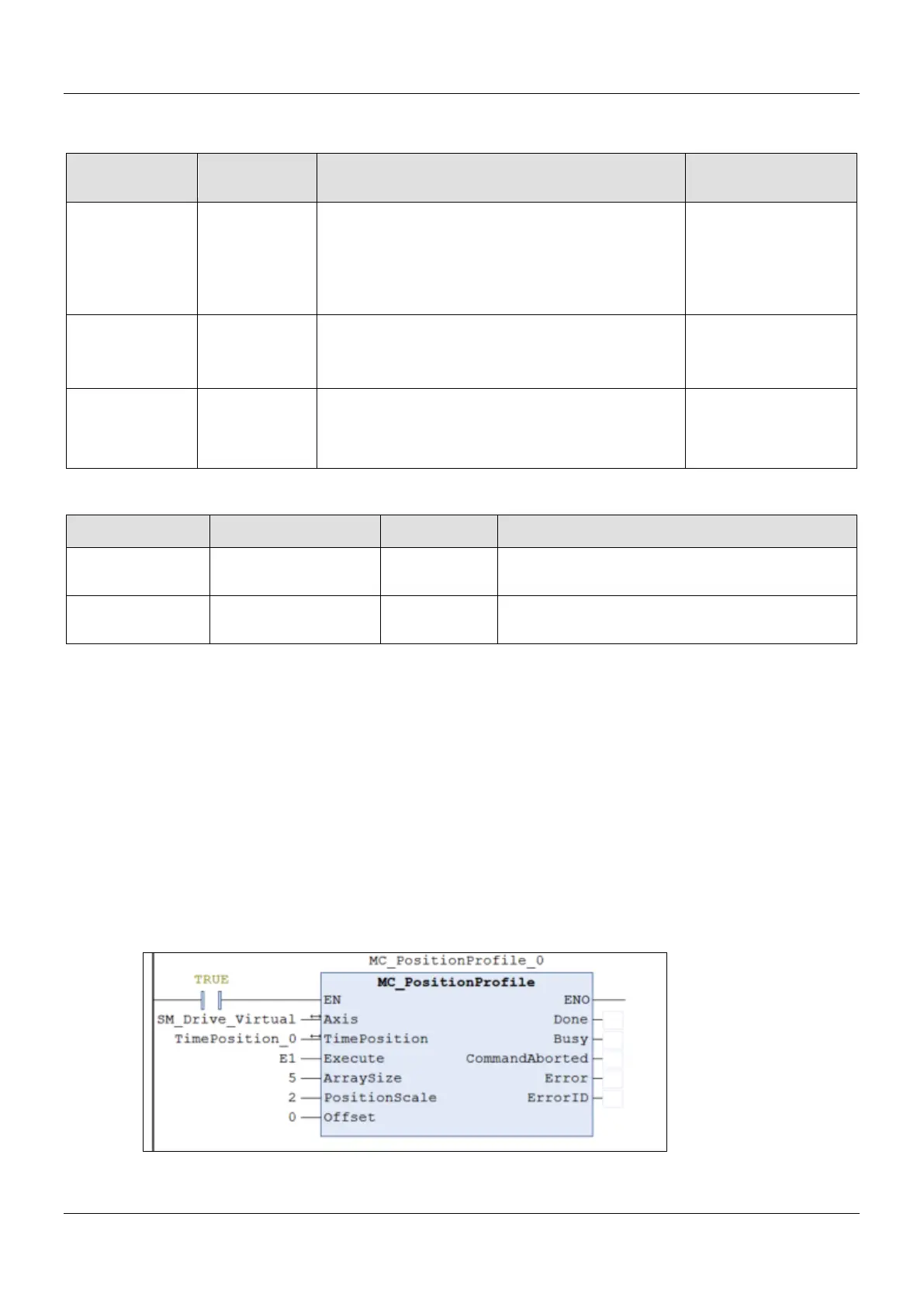
Example
The example below describes the behavior of MC_PositionProfile instruction.
Configure for the curve of motion profile:
 Loading...
Loading...

