31
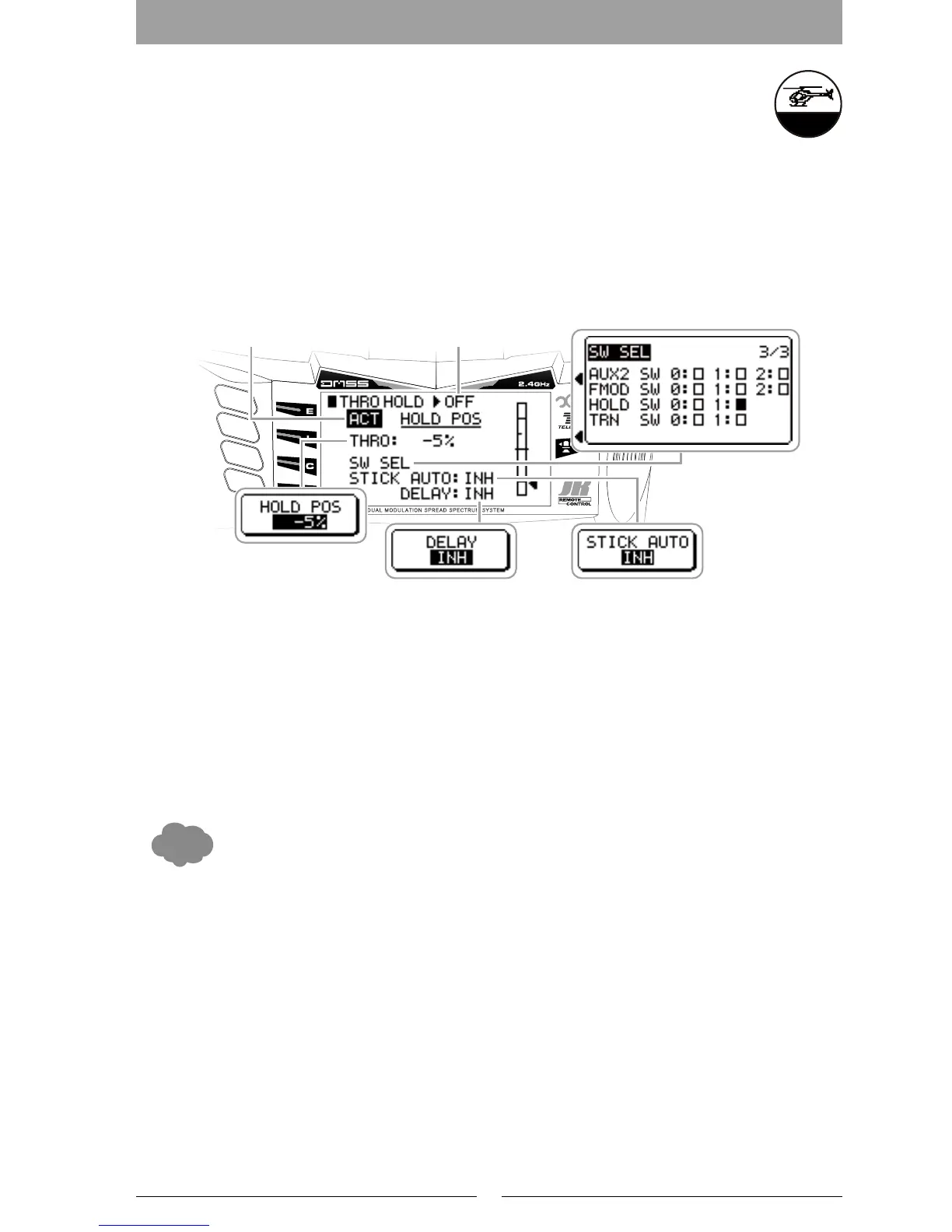
▋Throttle▋hold【THRO▋HOLD】
▋▋Function▋Explanation
This function is for autorotation landings – it holds the Throttle Servo at a low position. Using
a selected switch, the engine can be cut, or xed at an optional slow position. Further, there is also a Stick Auto
function that allows switching of the servo to the Hold position when the stick is lowered to a preset position.
▋▋Setting▋Method
This function is “INH” by default. Set the function to ACT. Then adjust the hold position as required. The Hold
switch is used by default, but this selection can be modied
By default, the “HOLD SW” is allocated to POS1. It is possible to allocate this switch to any desired switch
locations.
Stick Auto Function (STICK AUTO)
When “STICK AUTO” is set, the servo will change to the Hold position when the stick is lowered past a
predetermined position. To deactivate this function simply turn o the allocated switch.
Initially this function is inhibited. To activate this function, move the cursor to “INH”, and press the dial to
“ACT”. Move the cursor to the inversed display next to STICK AUTO, Move the throttle stick to desired position
and press the “STO” key to set the position (a numerical value between 0-100 will be displayed on the inversed
display).
To “INH” this function, press the CLR key while the display is inversed.
Hold delay function (DELAY)
It is possible to set a “DELAY“ to prevent a sudden increase in engine rotations when the Hold switch is set to
OFF. The duration of the delay can be set between 0.1sec to 2.0sec.
If the Hold Delay is set, any throttle setting in the Servo Speed function will be cancelled.
By setting throttle hold active, this function acts like an additional ight mode. It is possible to set dedicated
Dual rates, Pitch Curve, etc to this function.
▋▋Caution▋Note
After the setting, operate the servos and carefully conrm each of the Flight Mode settings before ying.

 Loading...
Loading...








