5─4
5.1 PREPARATION
yy
yyy
5
Basic Concept of Collision Avoidance
There are two aspects in collision avoidance: collision prediction and avoidance. Collision prediction is to
predict that two or more vessels will happen to occupy the same point at the same time, while collision
avoidance is to maneuver vessels not to occupy the same point at the same time.
In practical operation of vessels, a spot of collision has to be deemed to be a single point but a closed zone.
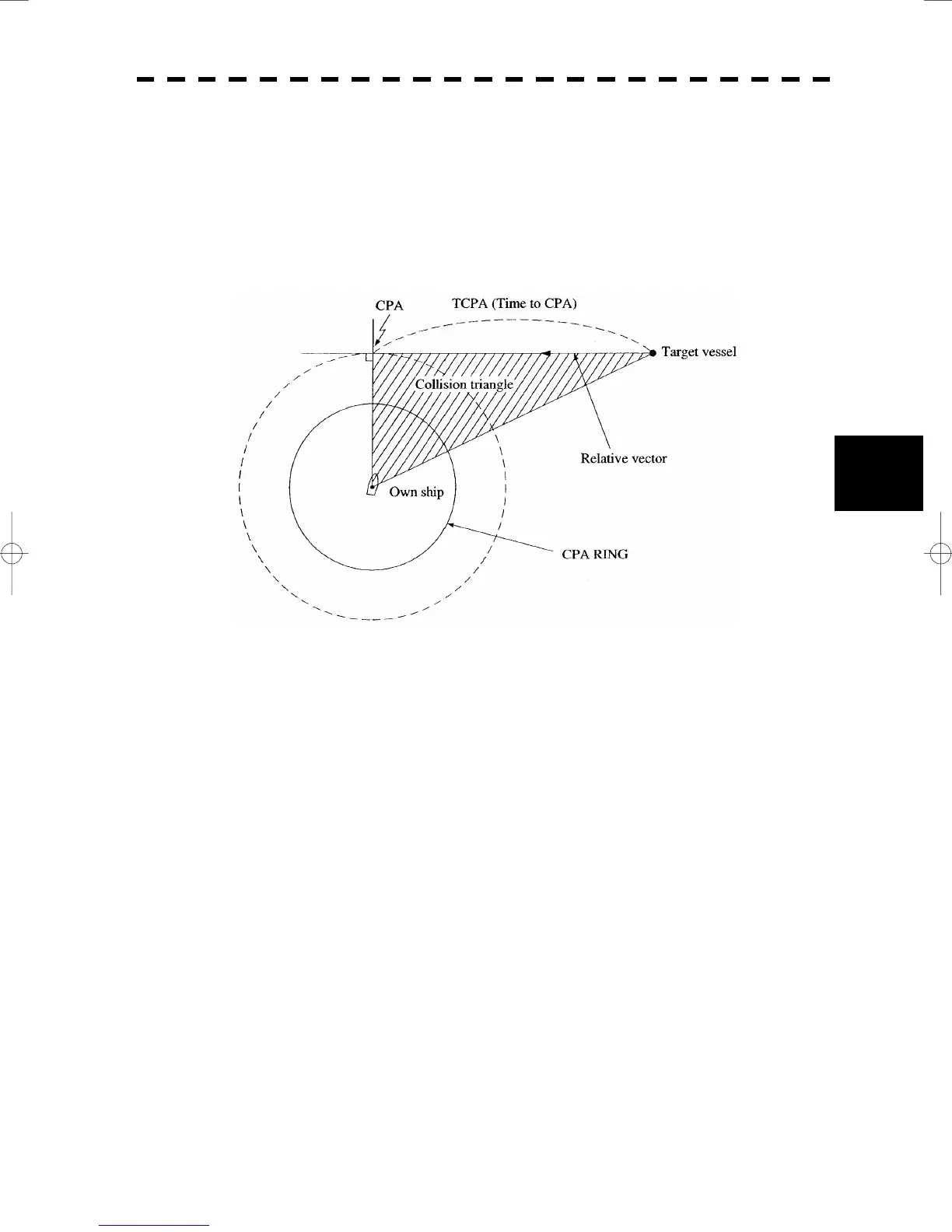
This closed zone is conceptually defined as a CPA (Closest Point of Approach). In collision prediction, the
time to be taken until a ship reaches the CPA is defined as a TCPA (Time to CPA).
Fig. 5-2 shows a diagram caked “Collision Triangle”.
Fig. 5-2 Collision Triangle
Relative Vector and True Vector
From two points of view, collision prediction and avoidance, it is necessary to obtain the relative vector of other
ship for prediction and the true vector of other ship for collision avoidance in order to grasp other ship’s aspect.
The relationship between the relative vector and true vector is shown in Fig. 5-3
Both rough CPA and TCPA can be obtained easily from the relative speed vector of other ship. This method
has an advantage that the risks of collision with all other ships within the radar range can be seen at a glance.
On the other hand, the course and speed of other ship can easily be obtained from its true speed vector, enabling
other ship’s aspect to be seen at a glance. Thus, the aspects of other ships (transverse, outsail, parallel run,
reverse run, etc. ) as described in the Act of Prevention of Collision at Sea can be readily grasped. If there is a
risk of collision with other ship, the operator can determine which rule to be applied and how to operate own
ship.
 Loading...
Loading...



