2: General operation Series 2600B System SourceMeter® Instrument
2-46 2600BS-901-01 Rev. C / August 2016
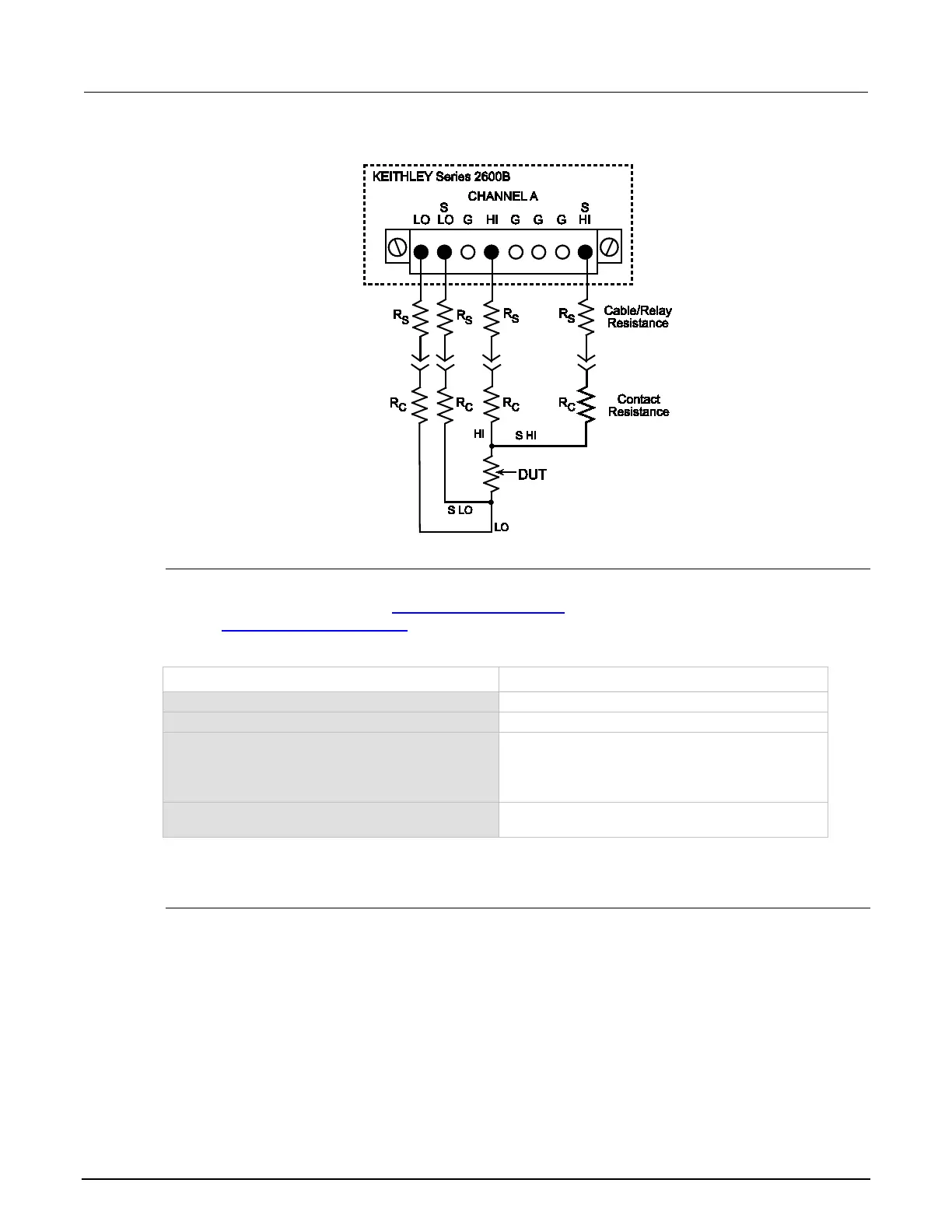
Figure 14: Contact check measurements
Contact check commands
The following table summarizes the basic contact check commands. For a more complete description
of these commands, refer to the TSP command reference (on page 7-1
). For connection information,
refer to Contact check connections (on page 2-56).
Basic contact check commands
Command* Description
flag = smuX.contact.check()
Determine if contact resistance is lower than threshold.
rhi, rlo = smuX.contact.r()
Measure the aggregate contact resistance.
smuX.contact.speed = speed_opt
Set speed_opt to one of the following:
0 or smuX.CONTACT_FAST
1 or smuX.CONTACT_MEDIUM
or
X
smuX.contact.threshold = rvalue
Set resistance threshold for the contact check function.
* smuX: For Models 2601B, 2611B, and 2635B, this value is smua (SMU Channel A); for Models 2602B, 2604B,
2612B, 2614B, 2634B, and 2636B, this value can be
(for SMU Channel A) or
(for SMU Channel B).
Contact check programming example
The following programming example illustrates the setup and command sequence for a typical
contact measurement. These commands set the contact check speed to fast and the threshold to
100 Ω. Then, a contact check measurement against the threshold is made. If it fails, a more accurate
contact check measurement is made, and the test is aborted. Otherwise, the output is turned on, and
the test continues.