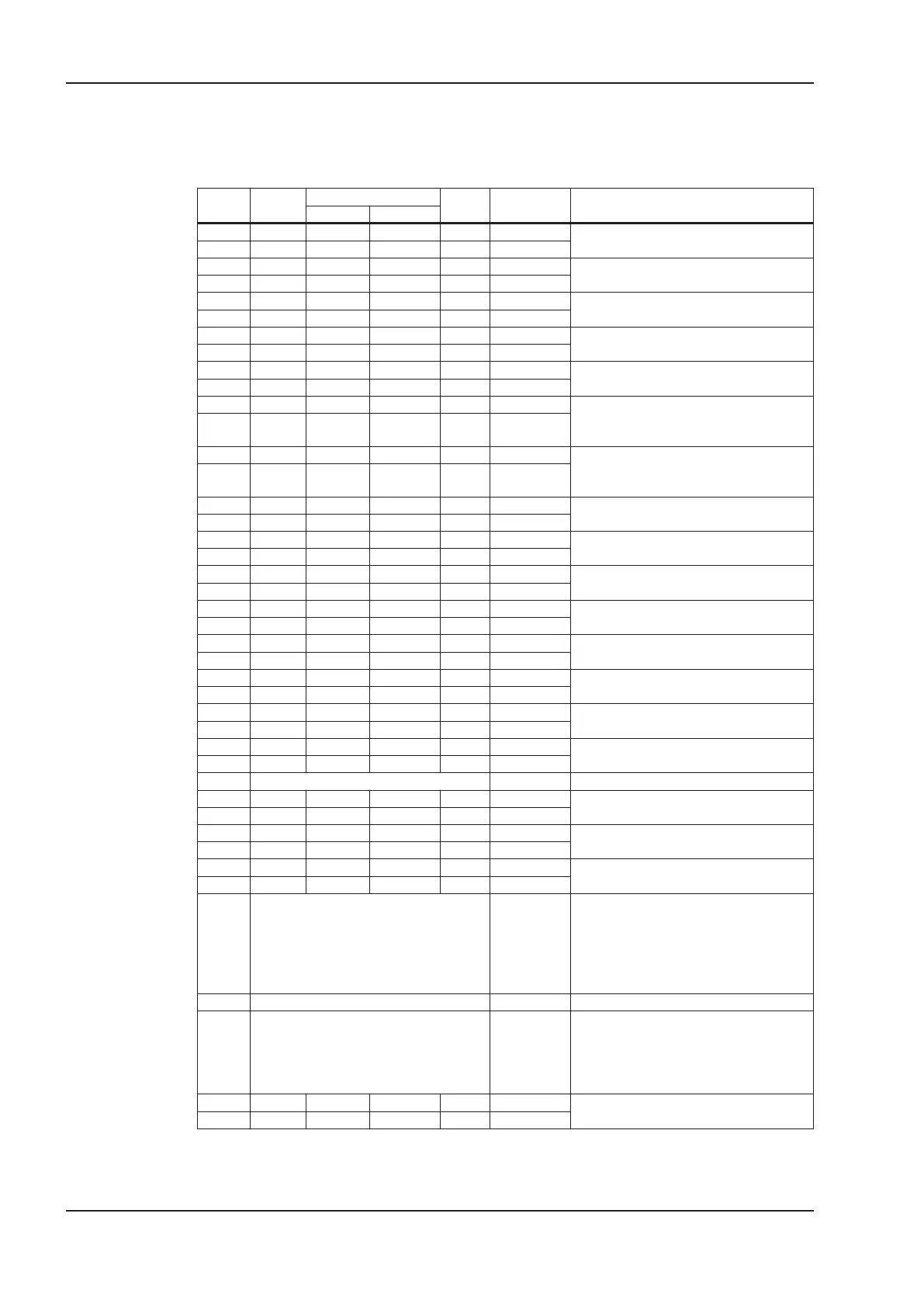
5.3.5 Example: Jog Mode via PDO
It is useful to disable unused PDOs. In Operation Mode "Digital Velocity" a digital speed setpoint is
transmitted via RXPDO. Actual position and actual speed is read via a TXPDO triggered by SYNC.
COB-ID
Control
byte
Index
Sub-
index
Data Comment
Low byte High byte
603 2F 60 60 00
h
03 00 00 00
mode of operation “Profile Velocity”
583 60 60 60 00
h
00 00 00 00
603 2F 00 16 00
h
00 00 00 00
delete entries for the first RXPDO
583 60 00 16 00
h
00 00 00 00
603 23 00 16 01
h
20 00 FF 60
mapping RXPDO1, Object 60FF, Sub-In
-
dex 0 speed setpoint, data length 32bit
583 60 00 16 01
h
00 00 00 00
603 2F 00 16 00
h
01 00 00 00
confirm number of mapped objects
583 60 00 16 00
h
00 00 00 00
603 2F 00 1A 00
h
00 00 00 00
delete entries for the first TXPDO
583 60 00 1A 00
h
00 00 00 00
603 23 00 1A 01
h
20 00 64 60 mapping TXPDO1/1, Object6064, Sub-In
-
dex 0 current position value in SI units,
data length 32bit
583 60 00 1A
01
h
00 00 00 00
603 23 00 1A 02
h
20 00 6C 60 mapping TXPDO1/2, Object606C, Sub-In
-
dex 0 current speed value, data length
32bit
583 60 00 1A
02
h
00 00 00 00
603 2F 00 1A 00h 02 00 00 00
check number of mapped objects
583 60 00 1A 00h 00 00 00 00
603 2F 00 18 02
h
01 00 00 00
set TXPDO1 to synchronous, transmission
with every SYNC
583 60 00 18 02
h
00 00 00 00
603 23 01 18 01
h
83 02 00 C0
disable TPDO2, set bit 31 (80h)
583 60 01 18 01
h
00 00 00 00
603 23 02 18 01
h
83 03 00 C0
disable TPDO3
583 60 02 18 01
h
00 00 00 00
603 23 03 18 01
h
83 04 00 C0
disabled TPDO4
583 60 03 18 01
h
00 00 00 00
603 23 01 14 01
h
03 03 00 80
disabled RPDO2
583 60 01 14 01
h
00 00 00 00
603 23 02 14 01
h
03 04 00 80
disabled RPDO3
583 60 02 14 01
h
00 00 00 00
603 23 03 14 01
h
03 05 00 80
disabled RPDO4
583 60 03 14 01
h
00 00 00 00
000 01 03 enable NMT
603 2B 40 60 00
h
06 00 00 00
shutdown
583 60 40 60 00h 00 00 00 00
603 2B 40 60 00
h
07 00 00 00
switch on
583 60 40 60 00
h
00 00 00 00
603 2B 40 60 00
h
0F 00 00 00
enable operation
583 60 40 60 00
h
00 00 00 00
203 00 40
setpoint V= 98,3 rpm
Calculated as follows:
4000h=16384dec=Ncmd;
10000=PGEARI;
(Ncmd/60)xPGEARI=V
(16384/10000)x60=98,3 rpm
080 send SYNC
183
FE 45 01 00
A6 AB 1A 00
response, position and Nact
Pos.= 00 01 45 FE = 83454 [Si units];
Nact = (001A AB A6) / 17894,4dec = 97,7
rpm
17894,4 is the const. factor.
603 2B 40 60 00
h
0F 01 00 00
intermediate stop
583 60 40 60 00
h
00 00 00 00
118 CANopen for S300/S700
Appendix 11/2018 Kollmorgen

 Loading...
Loading...








