5.3.13 Application: External Trajectory with Interpolated Position Mode
This example shows the possible application for giving two axes position setpoints within one PDO.
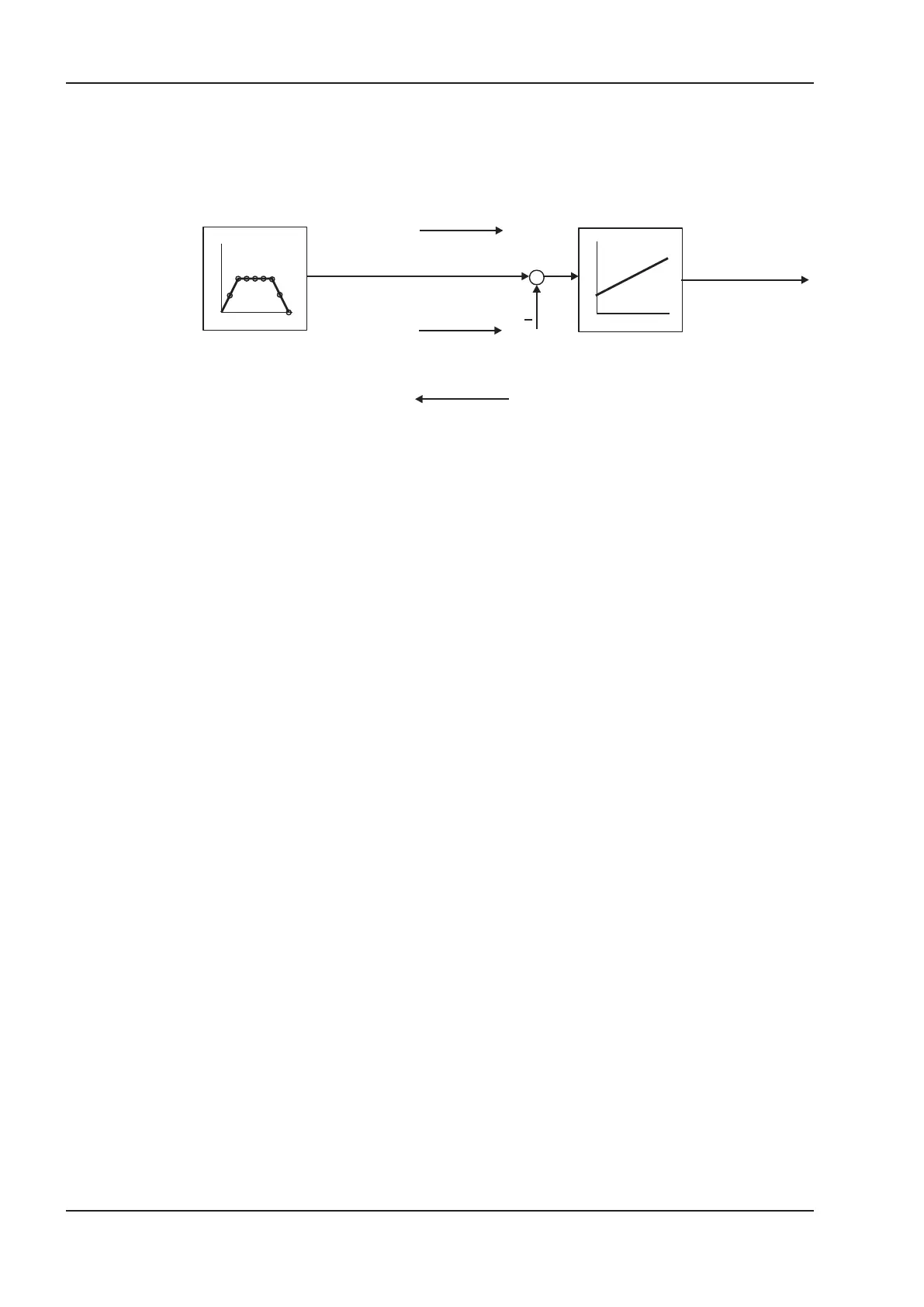
Controller structure for the position controller within the servo amplifier:
Description
All data are hexadecimal. In the example, the two axes in the system have the station addresses 1
and 2.
Prerequisits
— The internal syncronisation must be used for the IP-mode.
For that purpose the parameter SYNCSRC (Object 3683 sub 1) must be set to 3.
— The parameters must be saved to EEProm.
— A coldstart has to be done to enable the syncronisation possibility.
— The axes are homed (for this example).
The common PDO contains 2 IP (interolpated position) – setpoints and can be transmitted simulta-
neously to two stations, whereby each station can extract the relevant data. The other data can be
made ignored by using dummy entries (Object 2100 sub 0). For this purpose both axes have to
react on the same RPDO-COB-ID.
128 CANopen for S300/S700
Appendix 11/2018 Kollmorgen
Position setpoints
SYNC
RPDO Trajektory
No. 33
Position controller
speed setpoint
Position + Status
TPDO actual position in increments
No. 33

 Loading...
Loading...








