3.4.1 Network Management Objects (NMT)
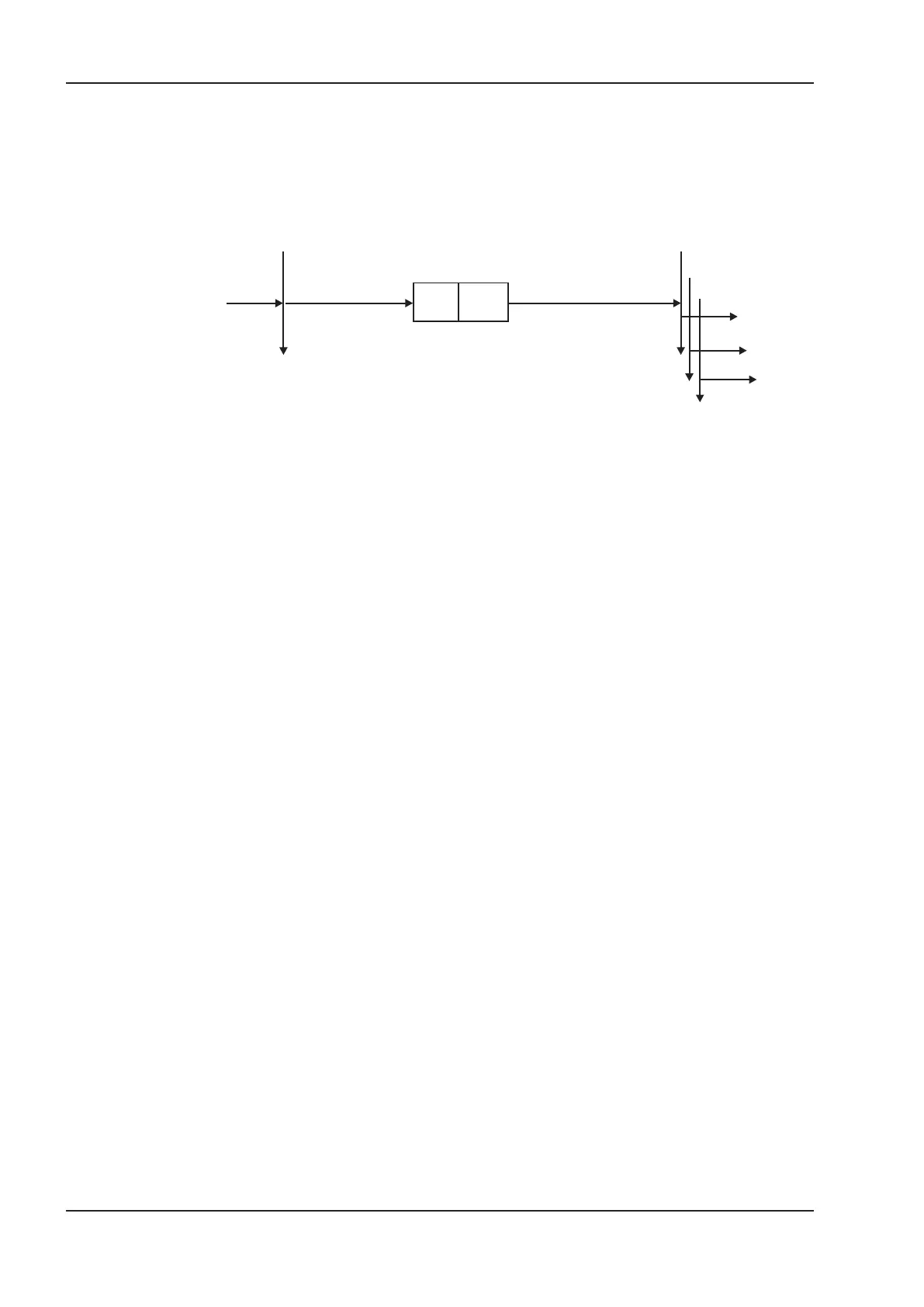
The NMT telegram looks like this:
The drive supports the following network management functions:
cs = 129, reset node: causes a cold-start of the drive.
This deletes all parameters saved in the RAM and loads the
values stored in the EEPROM.
cs = 130, reset communication node:
causes a stop of PDO-communication, gives a new bootup-message
cs = 1, start remote node: starts the CAN node.
I.e. the PDOs of the drive are enabled for operation.
From this moment, transmit-PDOs will be transmitted under event-
control, and cyclical process data operation can commence.
cs = 2, stop remote node: stops the CAN node, I.e. the drive no longer responds to any
received PDOs or transmits any PDOs.
3.4.2 Synchronization Object (SYNC)
The SYNC object usually is used as a periodic Broadcast Object and provides the basic clock for
the bus. SYNC has a high priority, to ensure constant time intervals. The usage of this protocol is
explained in the appendix from page 115. You can use the SYNC object to start motion task of
several axes simultaneously for example.
3.4.3 Time-Stamp Object (TIME)
This communication object is not supported by S300/S700.
3.4.4 Emergency Object (EMCY)
EMCY is event-triggered and generated by an internal fault/error situation. This object is transmitted
afresh for every error. Since the error codes are device-dependent, they are described in the Chap
-
ter CANopen Drive Profile (Þ p. 26). The last 8 Emergency error codes can be read via object
1003.
18 CANopen for S300/S700
CANopen communication profile 11/2018 Kollmorgen
COB-ID = 0
cs
NODE
ID
1
0
102
NMT Master
Start Remote Node
request
cs = command specifier
node-ID = station address
indication
indication
indication
NMT Slave(s)

 Loading...
Loading...








