4.10.5 Homing Mode Sequence
The homing movement is started by setting Bit 4 (positive edge). The successful conclusion is indi
-
cated by Bit 12 in the status word (see Object 6041
h
). Bit 13 indicates that an error occurred during
the homing movement. In this case, the error code must be evaluated (error register: Objects
1001
h
, 1003
h
, manufacturer status: Object1002
h
).
Bit 4 Meaning
0 homing inactive
0 Þ 1
start homing movement
1 homing active
1 Þ 0
interruption of homing movement
Bit 13 Bit 12 Meaning
0 0 reference point not set, or homing movement not yet finished
0 1 reference point set, homing movement finished
1 0 homing movement could not be successfully concluded (lag error)
1 1 impermissible state
4.11 Profile Position Mode (pp)
4.11.1 General Information
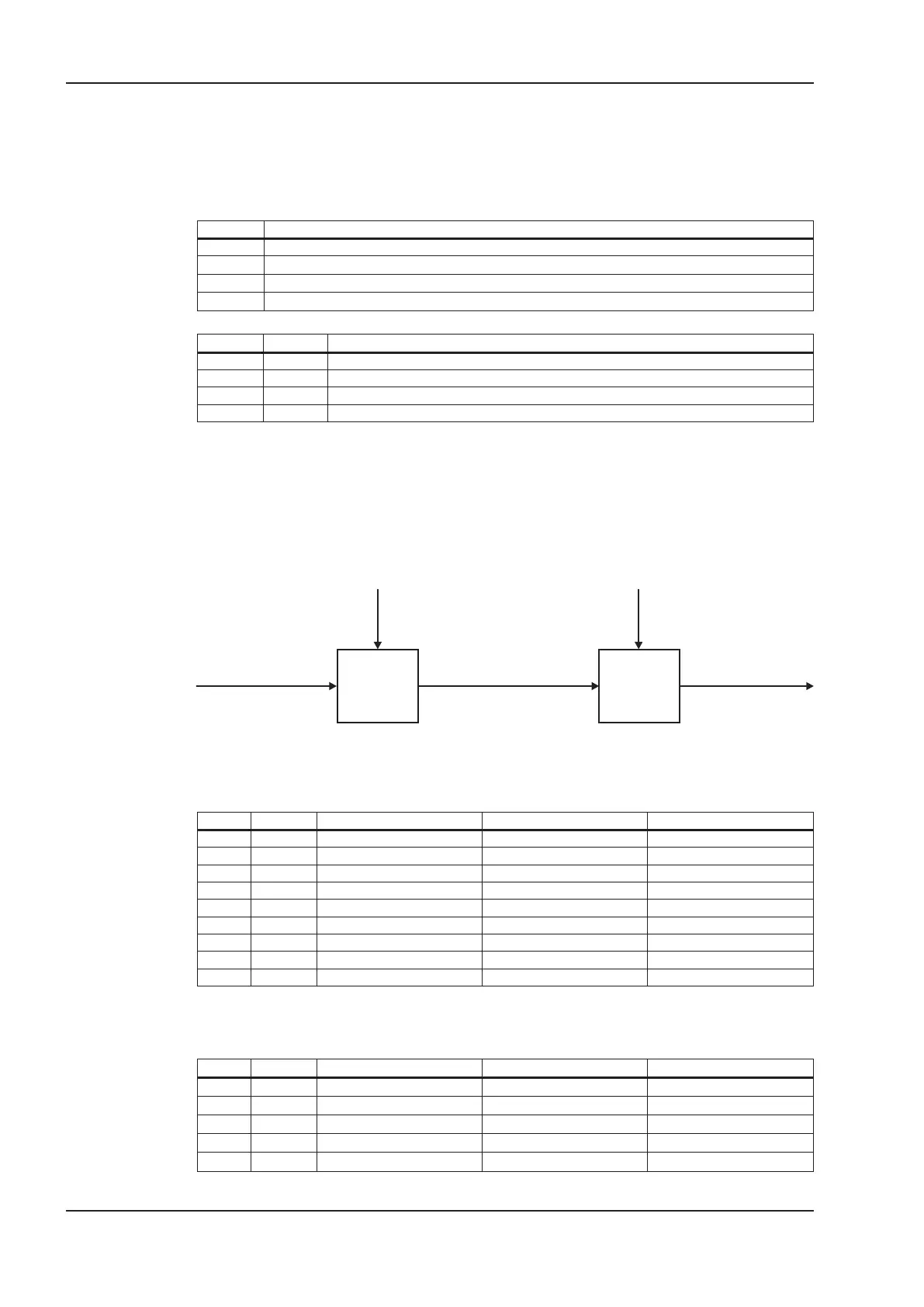
The overall structure for this mode is shown in this figure:
The special handshake procedure for the control word and status word is described on page 85.
4.11.2 Objects that are defined in this section
Index Object Name Type Access
607A
h
VAR target position INTEGER32 rw
607D
h
ARRAY software position limit INTEGER32 rw
607Fh VAR max. profile velocity UNSIGNED32 rw
6080h VAR max. motor speed UNSIGNED32 rw
6081
h
VAR profile velocity UNSIGNED32 rw
6083
h
VAR profile acceleration UNSIGNED32 rw
6084
h
VAR profile deceleration UNSIGNED32 rw
6085
h
VAR quick stop deceleration UNSIGNED32 rw
6086
h
VAR motion profile type INTEGER16 rw
4.11.3 Objects that are defined in other sections
Index Object Name Type Section
6040
h
VAR control word INTEGER16
dc (Þ p.56)
6041
h
VAR status word UNSIGNED16
dc (Þ p.56)
6093
h
ARRAY position factor UNSIGNED32
fg (Þ p.62)
6094
h
ARRAY velocity encoder factor UNSIGNED32
fg (Þ p.62)
6097
h
ARRAY acceleration factor UNSIGNED32
fg (Þ p.62)
84 CANopen for S300/S700
CANopen Drive Profile 11/2018 Kollmorgen
Trajectory
Generator
Trajectory Generator
Parameters
Position Control
Law Parameters
target_position
(607A )
h
control_effort
(60FA )
h
position_demand_value
(60F2 )
h
Position
Control
Function

 Loading...
Loading...








