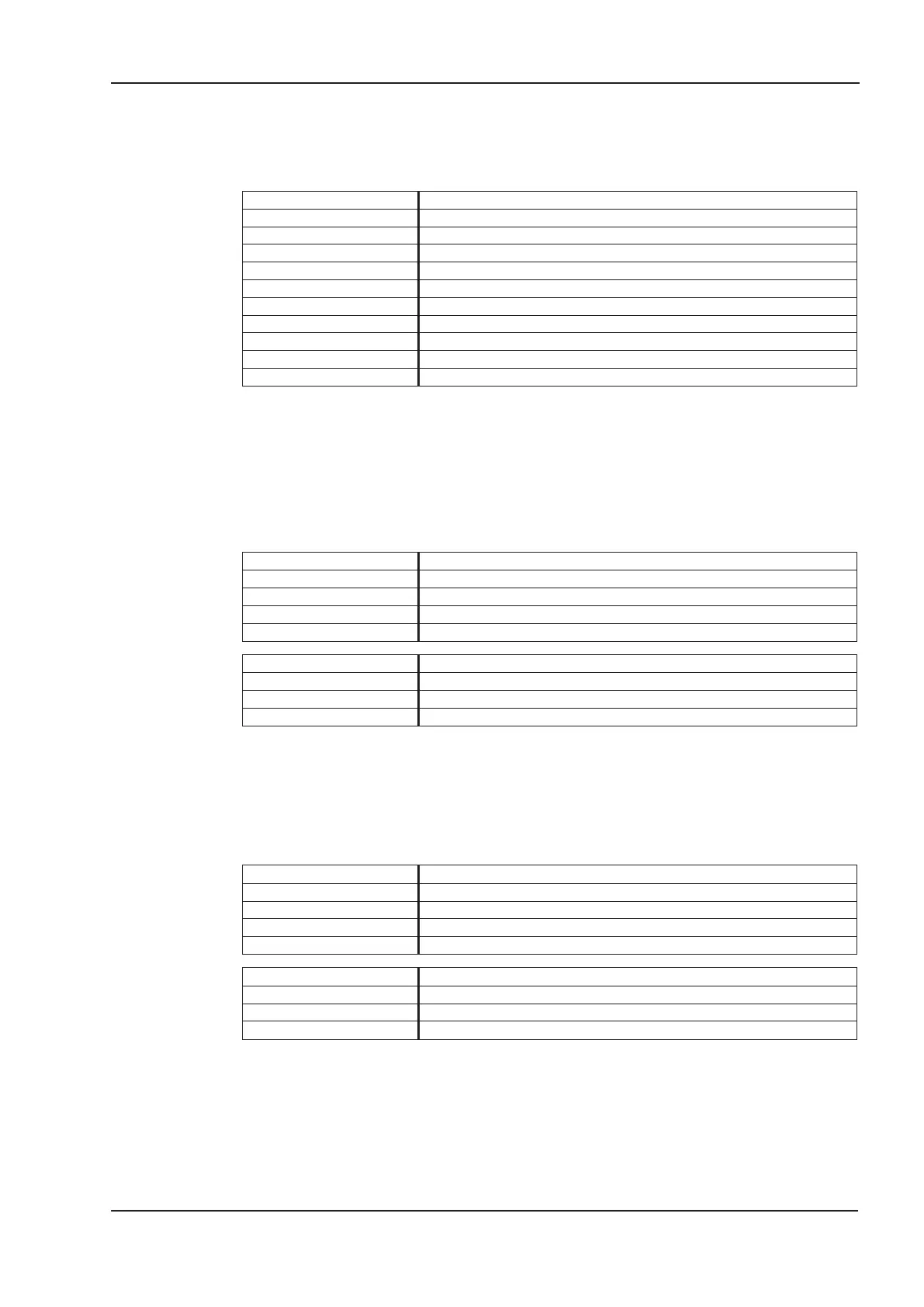
4.8.4.2 Object 6064h: position actual value (DS402)
The object position actual value provides the actual position. The resolution can be altered by the
gearing factors of the position controller (Object 6092).
Index 6064
h
Name
position actual value
Object code
VAR
Data type
INTEGER32
Mode
pc, pp
Access
rw
PDO mapping
possible
Unit
position units
Value range
(-2
31
) ... (2
31
-1)
Default value
—
EEPROM
no
4.8.4.3 Object 6065h: Following error window
The following error window defines a range of tolerated position values symmetrically to the position
demand value. A following error might occur when a drive is blocked, unreachable profile velocity
occurs, or at wrong closed loop coefficients. If the value of the following error window is 0, the follo
-
wing control is switched off.
Index 6065
h
Name
Following error window
Object code
VAR
Data type
UNSIGNED32
Category
optional
Access
rw
PDO mapping
possible
Value range
UNSIGNED32
Default value
1/4 of a motor revolution
4.8.4.4 Object 6067h: Position window (DS402)
The position window defines a symmetrical range of accepted positions relatively to the target posi
-
tion. If the actual value of the position encoder is within the position window, this target position is
regarded as reached. The status word bit "Target reached” goes to 1.
Index 6067
h
Name
Position window
Object code
VAR
Data type
UNSIGNED32
Category
optional
Access
rw
PDO mapping
possible
Value range
UNSIGNED32
Default value
4000 position units
CANopen for S300/S700 75
Kollmorgen 11/2018 CANopen Drive Profile

 Loading...
Loading...








