Parameters
Operating manual for INVEOR α | DOC01539818 - 0004 | 2017-01 | V2.0 EN 77
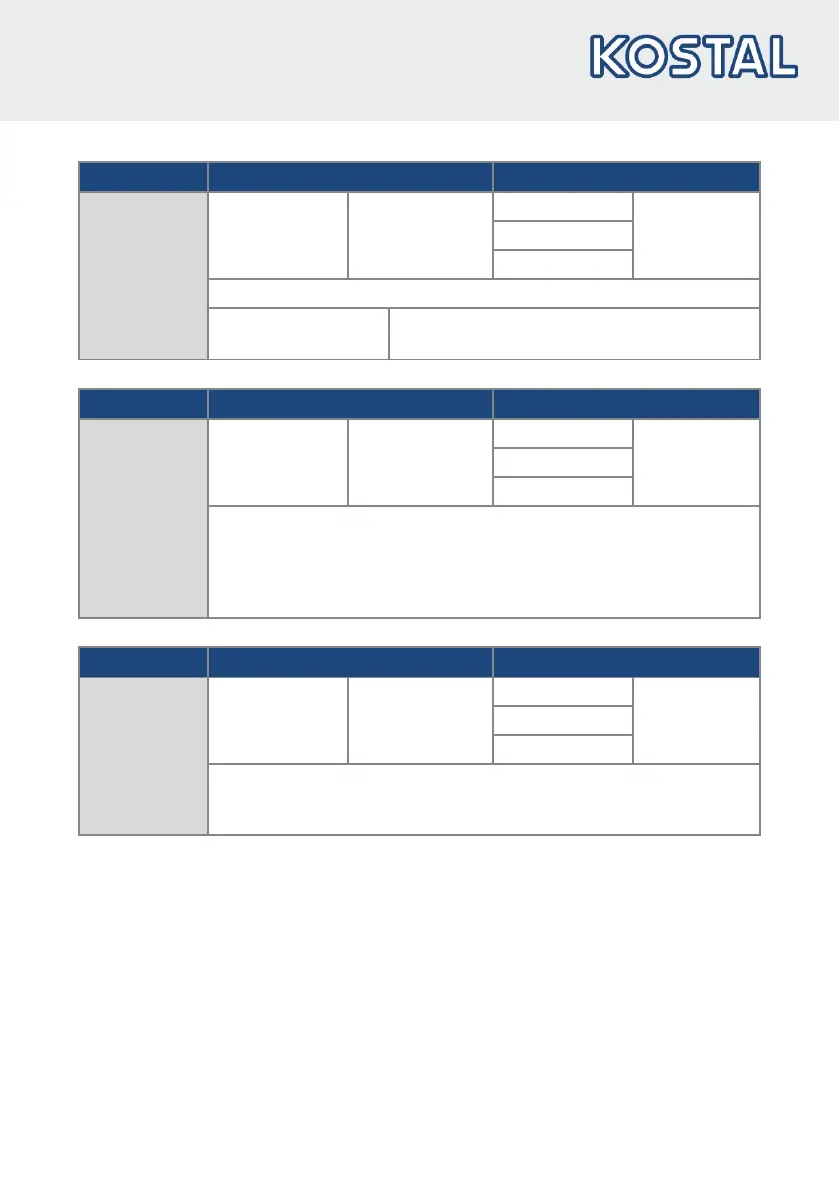
3.069 PID fixed target mode Unit: integer
Relationship
to parameter:
1.100
3.062 to 3.068
Parameter
manual:
P. xy
Transfer status:
2
min.:
0 Own value
(to be entered!)
max.: 2
def.: 0
Selection of the digital inputs used for fixed frequencies
0 = Digital In 1
1 = Digital In 1, 2
(PID fixed target value 1) (3.064)
(PID fixed target values 1 – 3) (3.062 to 3.064)
3.070 PID standby time Unit: s
Relationship
to parameter:
1.020
Parameter
manual:
P. xy
Transfer status:
2
min.:
0 Own value
(to be entered!)
max.: 10000
def.: 0
If the drive controller runs for the set time at its minimum frequency (parameter
1.020), the motor is stopped (0 Hz), see also Chapter 5.2.1 Explanation of
operating modes / fixed frequency.
0 = disable
> 0 = waiting time until stand-by function is enabled
3.071 PID stand-by hysteresis Unit: %
Relationship
to parameter:
3.060
Parameter
manual:
P. xy
Transfer status:
2
min.:
0 Own value
(to be entered!)
max.: 50
def.: 0
Condition for waking up the PID controller from stand-by.
Once the control difference exceeds the set value as %, the control begins
again, see also PID controller operating modes.