116
APPENDICES
Appendix A: Inertia Correction
A.1 INERTIAL EFFECT ON MOTOR TEST DATA
A major advantage of the DSP7000 is its ability to obtain full motor performance data (free run
to locked rotor) by continuous load application with an absorption dynamometer. Data acquisition
is fast, resulting in minimal motor I
2
R losses, and loading characteristics simulate actual end-use
applications.
When a motor is accelerating or decelerating, the measured torque is the sum of the true motor
torque ± the inertial torque or stored energy of the system. Unless inertial torque is excluded, motor
performance will vary in proportion to the rate of acceleration or deceleration.
This type of error can produce problematic test results. For example, during rapid deceleration,
system inertia can produce apparent efficiency greater than 1.0. This error may occur if output power
is divided by input power without extracting the stored energy in the system.
Since “inertial effect” is only a factor when speed is changing, and because inertial torque is
proportional to the rate of change, inertial value may be expressed as a unit of torque per change
in rpm in a given period of time. With the DSP7000, properly adjusted PID values yield constant
change in rpm so that the inertial torque can be expressed as a constant.
A.2 PROCEDURE FOR INERTIA CORRECTION
1. Determine the torque Correction Factor (CF) as follows:
• AdjustthePIDloopproperly
• Establishatorquevalueequaltotheinertialtorque.
2. Use the “Program Down” command (PD#) to ramp to 75% of the free-run speed.
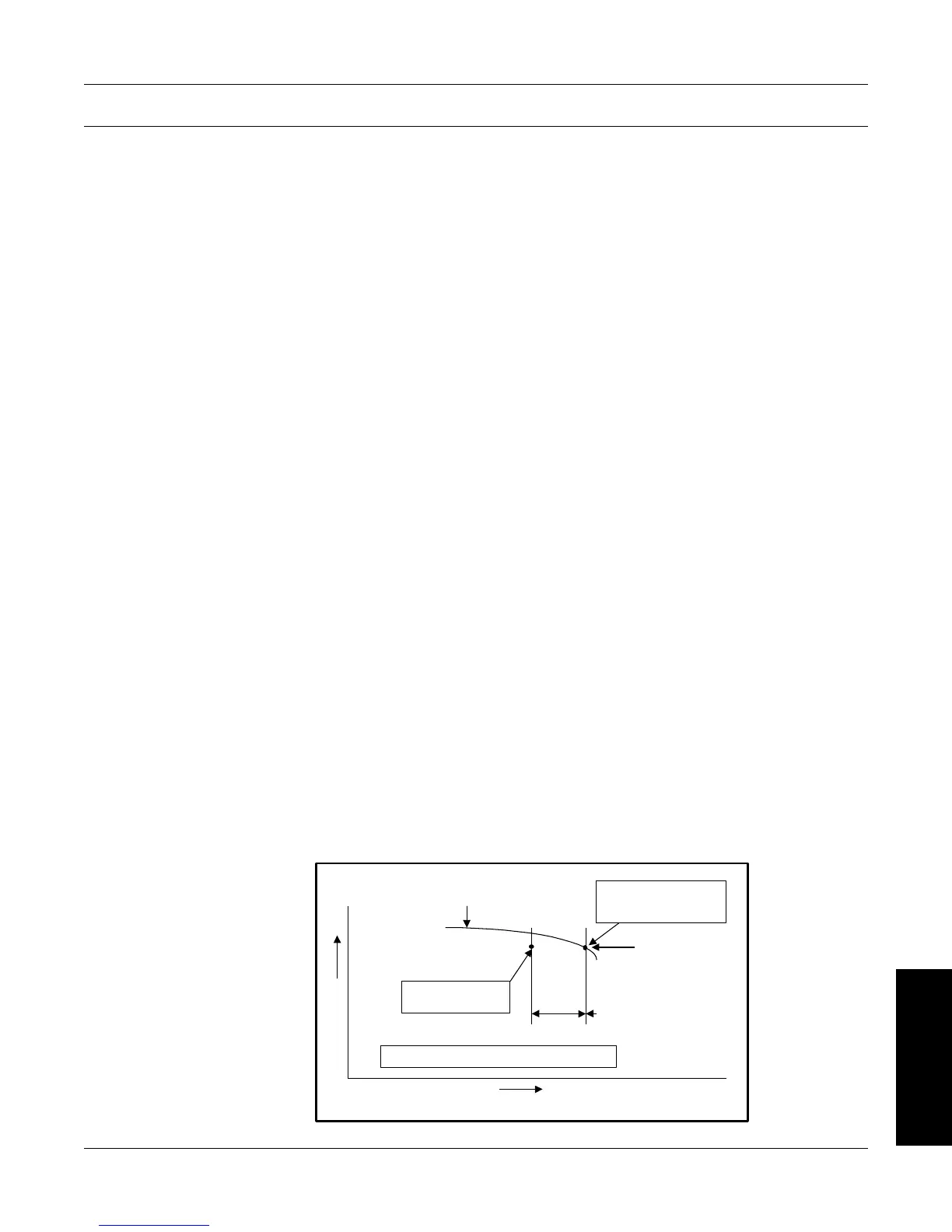
3. Select a data point on the performance curve where speed will be approximately 78% of the
free-run speed. Let this represent the dynamic speed-torque value.
4. Immediately program your DSP7000 (Nddddd) to a speed equal to the dynamic speed value.
When the speed stabilizes, use this as the static torque value.
CF = Dynamic Torque - Static Torque
To correct your data, subtract the CF from each torque point obtained during the ramp.
Example:
FR
0
TORQUE
DYNAMIC
TORQUE VALUE
SPEED VS TORQUE
CURVE WITH CONSTANT
DECELERATION
78% OF FR
STATIC TORQUE
VALUE
CF = DIFFERENCE IN TORQUE
S
P
E
E
D
DIFFERENCE IN TORQUE

 Loading...
Loading...