40
Magtrol Model DSP7000 Dynamometer ControllerChapter 4 – PID Settings
SETUP
a. If the response was too slow, increase the I term in 1-5% increments and repeat #8.
b. If the response was too fast, decrease the I term in 1-5% increments and repeat #8.
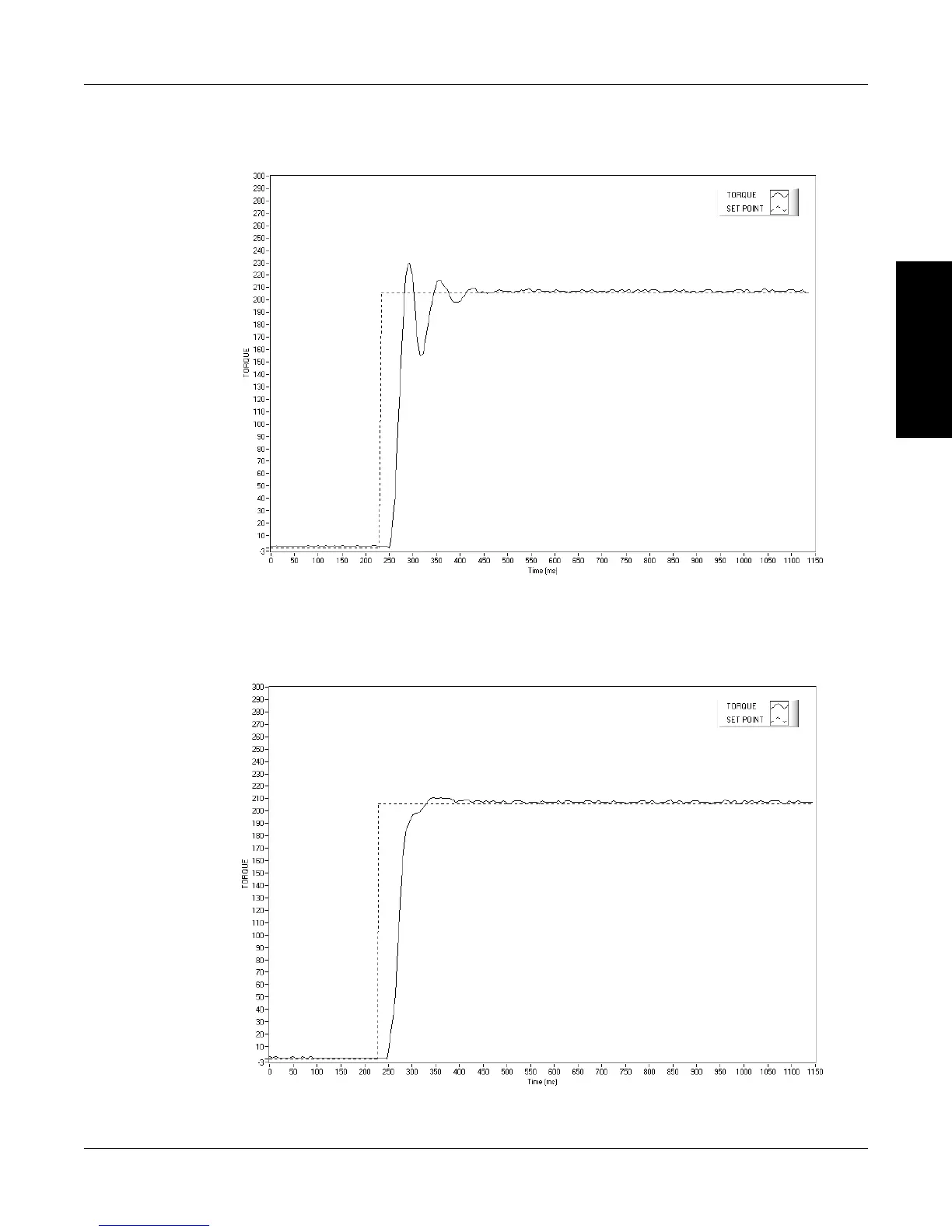
Figure 4–4 Initial I Setting for Torque Control
c. If there is too much over shoot, increase the D term in 1% increments and repeat #8. For
each incremental increase of the D term, reduce the P term by a proportional amount.
Figure 4–5 Initial D Setting for Torque Control

 Loading...
Loading...