72
Magtrol Model DSP7000 Dynamometer ControllerChapter 7 – Computer Controlled Operation
OPERATION
EXAMPLE
If a motor is running at 1725 rpm clockwise, with the dynamometer loading the motor to
22.6 oz.in., the DSP7000 will return:
S 1725T22.60R
By manipulating the string, the speed-torque and shaft direction (if required) can be extracted.
Then separate numerical variables can be assigned to them for data processing.
7.2.2 ouTpuT Binary CoMManD (oB)
A list of paramaters can be created using the COB (Configure Output Binary) Table. The list can be
retrieved at a rate of 488 samples per second. Up to 35 paramaters can be added to the list making
it possible to read 488 × 35 = 17080 parameters per second all synchronized in time.
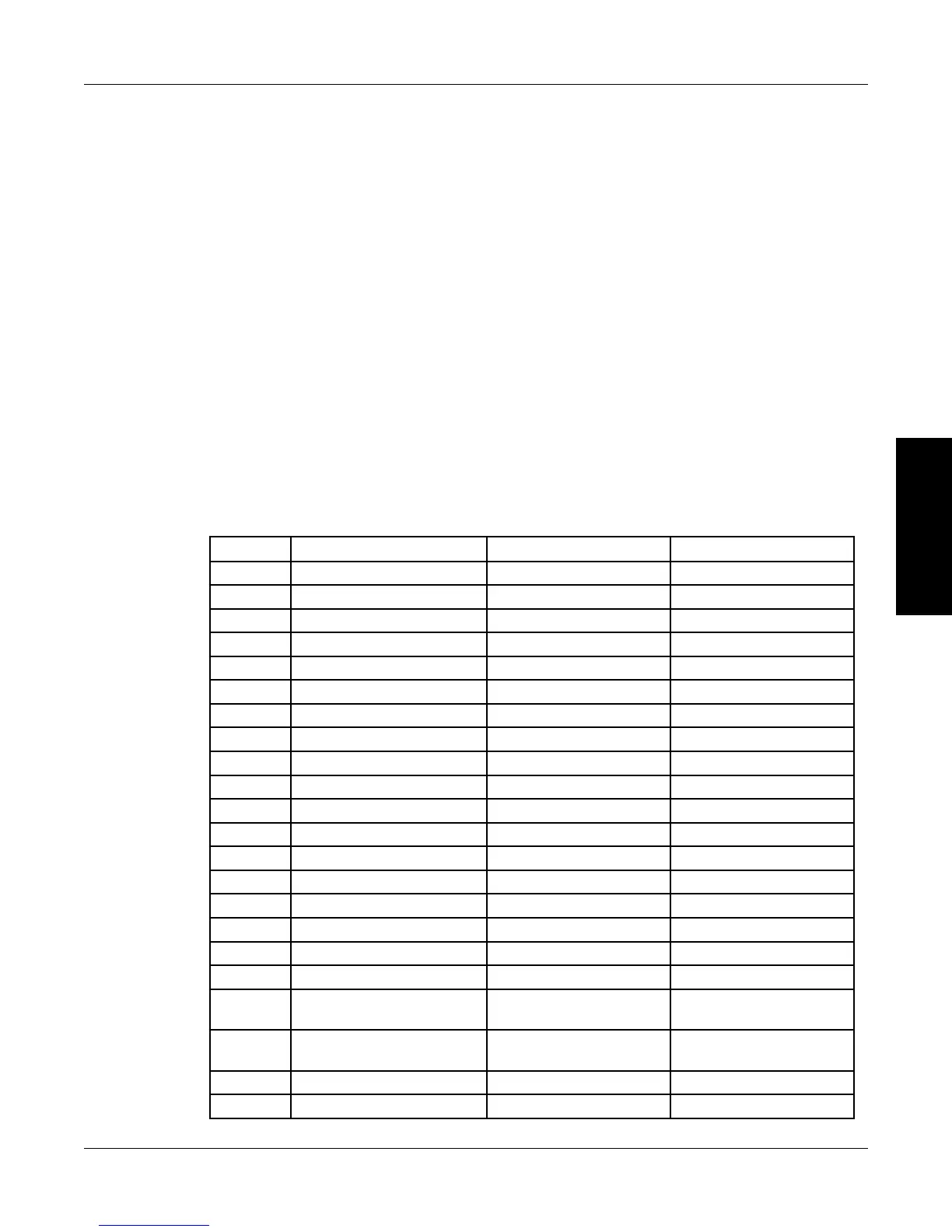
1. The user used the COB table to configure the DSP7000 to package the required data.
Minimum command is the return of the timers (COB,0,1).
Number Data Description Data Type
0. TimeH Time Stamp HIGH Integer
1. TimeL Time Stamp LOW Integer
2. CNL1 Speed Channel 1 speed Float
3. CNL1 Torque Channel 1 torque Float
4. CNL1 Speed SET POINT Channel 1 set speed Float
5. CNL1 Torque SET POINT Channel 1 set torque Float
6. CNL2 Speed Channel 2 speed Float
7. CNL2 Torque Channel 2 torque Float
8. CNL2 Speed SET POINT Channel 2 set speed Float
9. CNL2 Torque SET POINT Channel 2 set torque Float
10. AI11 I/O card 1 analog input 1 Float
11. AI12 I/O card 1 analog input 2 Float
12. AI21 I/O card 2 analog input 1 Float
13. AI22 I/O card 2 analog input 2 Float
14. Not Dened Float
15. Not Dened Float
16. Not Dened Float
17. Not Dened Float
18. Status 1 Mix channel 1 of DIs and
alarms … TBD
Integer
19. Status 2 Mix channel 1 of DIs and
alarms … TBD
Integer
20. Filter_out1 Float
21. Filter_out2 Float
 Loading...
Loading...