73
Magtrol Model DSP7000 Dynamometer Controller
Chapter 7 – Computer Controlled Operation
OPERATION
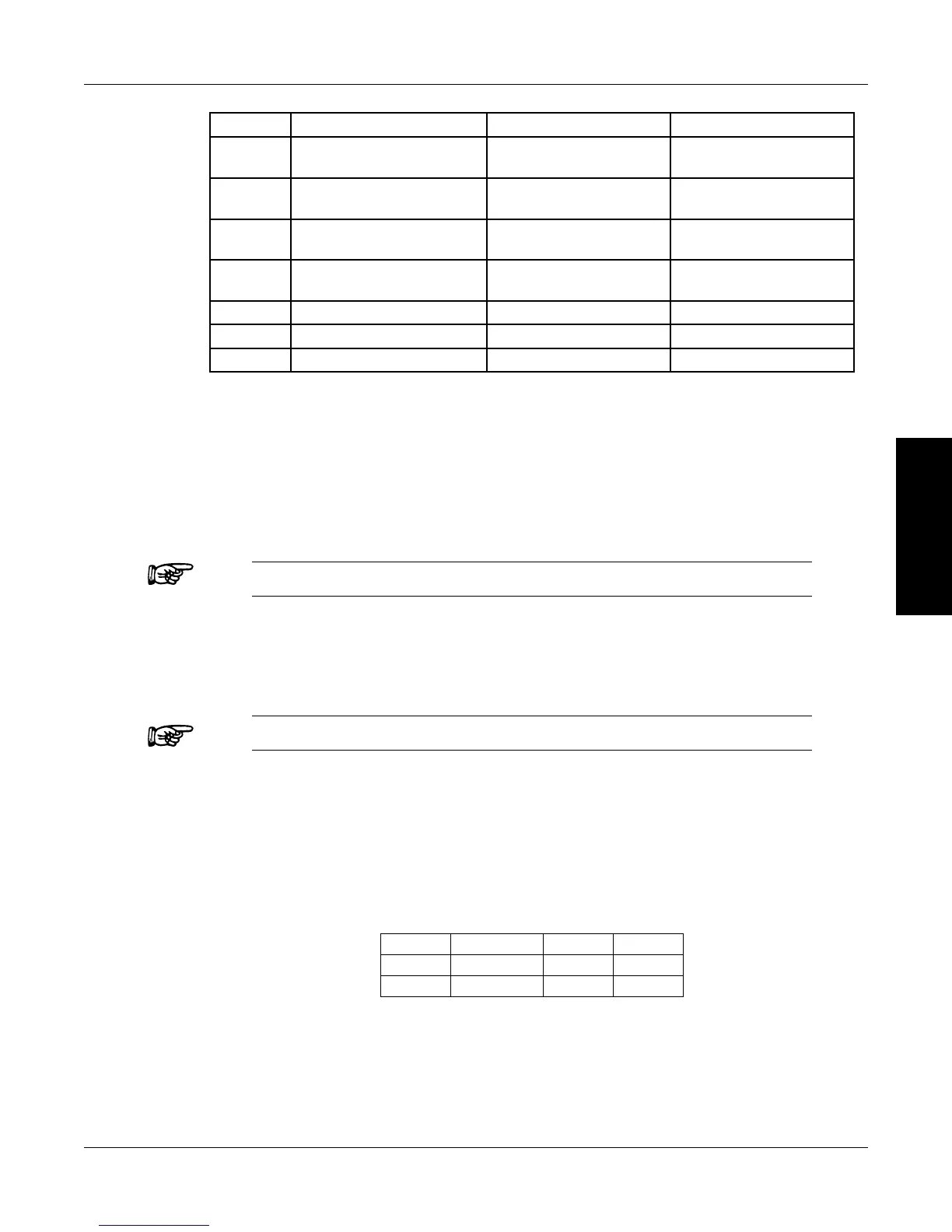
Number Data Description Data Type
22. Quad_cnt_1 Quadrature position
counter 1
Integer
23. Quad_time_1 Quadrature position time
1
Integer
24. Quad_cnt_2 Quadrature position
counter 2
Integer
25. Quad_time_2 Quadrature position time
2
Integer
26. Display speed1 Channel 1 display speed Float
27. Display speed2 Channel 2 display speed Float
28.-35 PA DATA (13) Power analyzer data Not Dened
2. Second the user used the OB command to retrieve the data. The data received from the Ob
command is all the data acquired since the last OB command. The user must read the data
before 0.5 seconds elapses to avoid missing any data. The data can be read in intervals
as small as 50 ms to as long as 500 ms relieving the data acquisition system from timing
problems
EXAMPLE
COB,0,1,2,3
Note: The OB command is only applicable to the USB Configuration.
7.3 PROGRAMMING
Note: Check the manual provided with your software for full instructions.
7.3.1 DaTa TerMinaTion CHaraCTerS
Use the following information to answer the formatting questions asked when installing
your GPIB software. All GPIB data acquisition systems require the use of data termination
characters. The DSP7000 uses the GPIB standard termination characters Carriage Return
(CR) and Line Feed (LF). Provide them in that order.
7.3.1.1 Codes for CR - LF
BASIC HEX DEC
CR =
CHR$(13) 0D 13
LF =
CHR$(10) 0A 10
 Loading...
Loading...