80
Magtrol Model DSP7000 Dynamometer ControllerChapter 7 – Computer Controlled Operation
OPERATION
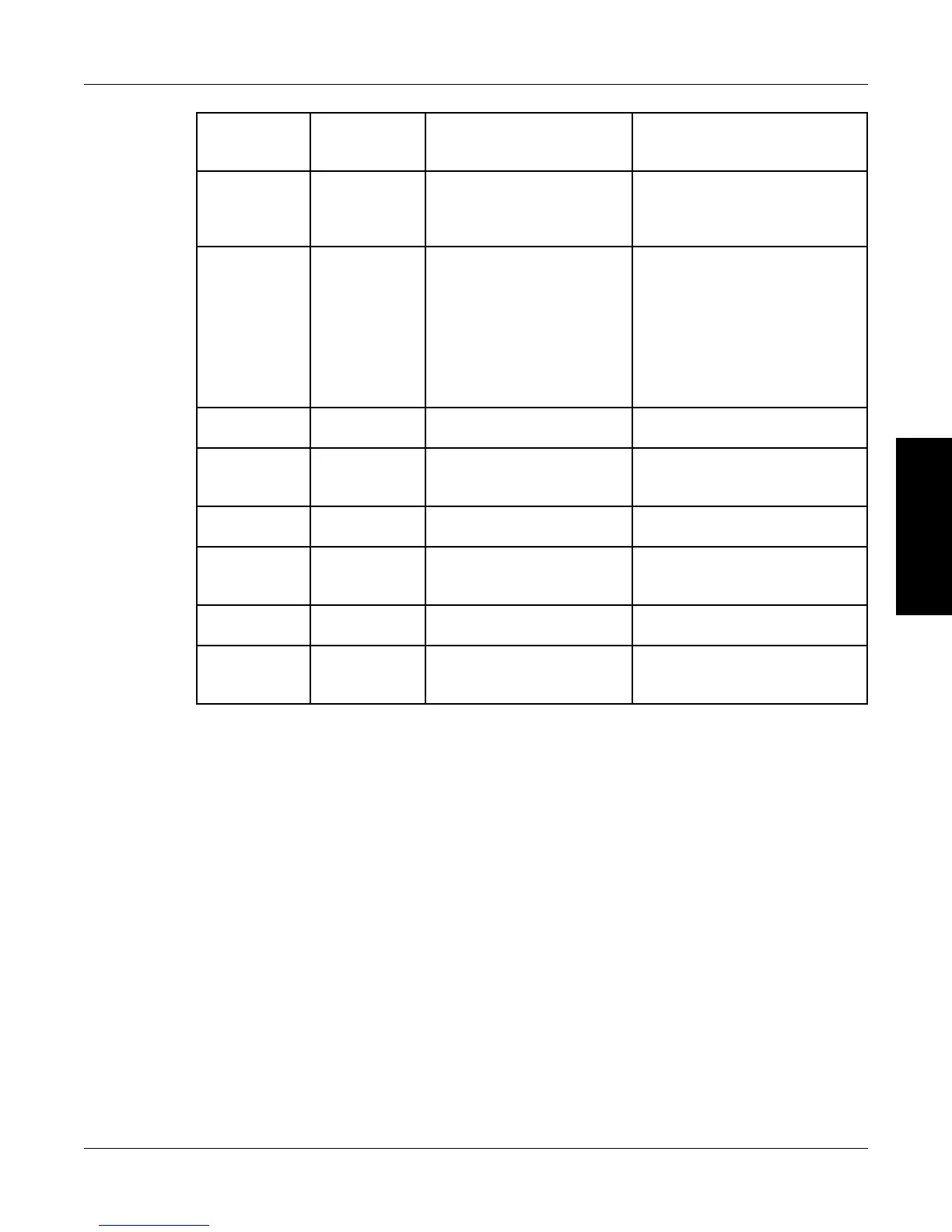
Command
Code
Channel 1
Command
Code
Channel 2
Function Explanation
N1 N2 • Resets speed point to
maximum speed.
• Sets speed mode OFF.
• Sets brake OFF.
Use this command, sent
alone, to reset any previous
speed-stabilized setting to the
maximum speed range.
N1,xx.xx N2,xx.xx • Sets speed point to #.
• Sets brake ON.
Use this command to load the
motor under test to a specic
speed value #. Issue a speed
range command (F#) rst for
best dynamic response. The
Controller is functioning with the
dynamometer as a closed loop
system. Adjust the speed PID
values to tune the response.
ND1,xx ND2,xx Sets speed derivative to #. Derivative value # can be any
number from 0 to 99.
NDS1,# NDS2,# Used as a multiplier for
the D coefcient in the PID
equation.
Values for # are A, B, C, D, E,
F, G, H or I.
NI1,xx NI2,xx Sets speed integral to #. Integral value # can be any
number from 0 to 99.
NIS1,# NIS2,# Used as a multiplier for
the I coefcient in the PID
equation.
Values for # are A, B, C, D, E,
F, G, H or I.
NP1,xx NP2,xx Sets speed proportional to
# gain.
Proportional gain value # can
be any number from 0 to 99.
NPS1,# NPS2,# Used as a multiplier for
the P coefcient in the PID
equation.
Values for # are A, B, C, D, E,
F, G, H or I.
 Loading...
Loading...