Manitowoc Published 05-09-17, Control # 014-28 1-15
16000 SERVICE/MAINTENANCE MANUAL INTRODUCTION
command direction. Hydraulic fluid displaced by motor
returns through hydraulic piping to inlet side of system pump.
Swashplate tilt angle determines volume of fluid that can be
pumped to the motor. Increasing swashplate tilt angle
increases piston stroke length, allowing more fluid to be
pumped to the motor. Motor servos in drum and travel
systems allow low and high speed operation.
Each pump has two multifunction valves that consist of
system relief valve and charge flow make-up check valve.
Pump system multifunction valves control maximum system
pressure and protect each pump system from damage by
limiting pressure spikes in each operating direction. When
preset loop system pressure is reached, multifunction valves
limit system pressure by de-stroking pump or transferring
fluid from high-pressure side to low-pressure side.
Charge Pressure
Charge pressure in each closed-loop system is preset at
approximately 350 psi (24 bar) with a relief valve in charge
pump. Charge pressure must be at preset value as lower
pressures can cause a slowing or stopping of operation. If
the charge pressure is set too high, the hydraulic system
could be damaged. When a system control handle is in
neutral the main display indicates system charge pressure.
If any charge pressure system drops, the system brake
begins to apply at approximately 200 psi (14 bar). Main
system pumps de-stroke as charge pressure drops to
minimum pressure. The accessory pump de-strokes if the
suction side pressure drops below 160 psi (11 bar).
Hydraulic Motors
See hydraulic motor manufacturer’s Service Manual for a
complete description of a hydraulic piston motor.
Variable displacement low torque/high speed, bent axis
piston hydraulic motors are used in the travel, boom/mast
hoist, and load drum systems. The swing system motor is a
fixed displacement, low torque/high speed, bent axis piston
hydraulic motor. Each motor contains a cylinder block,
pistons, output shaft, and internal flushing valve. Boom/mast
hoist and load drums motors have a PCP (Pressure Control
Pilot) valve that controls output speed/torque of the motor.
Motor cylinder block axis is tilted at an angle to output shaft
with pistons fitted axially around its axis. The internal end of
output shaft has a large flange face similar to pump
swashplate. The motor piston ends are connected to output
flange face and do not ride around the axis of rotating flange
face like the pump pistons.
Hydraulic fluid from pump enters selected inlet side of motor
and places a force against pistons. The retained piston ends
place a thrust against output flange with a rotational torque
that turns output shaft. This also rotates the cylinder block on
bent axis, while tilt angle to flange face moves the pistons as
they rotate. Hydraulic fluid displaced by the motor pistons,
exits motor and returns to inlet side of system pump through
hydraulic piping.
Pressure Monitoring
The main display indicates the selected system pressures.
The system pressure displayed is charge pressure or
greater. System pressure can also be checked at each
pressure sender diagnostic coupler with a 10,000 psi
(690 bar) high pressure gauge, when that system pump is
stroked.
Basic Operation
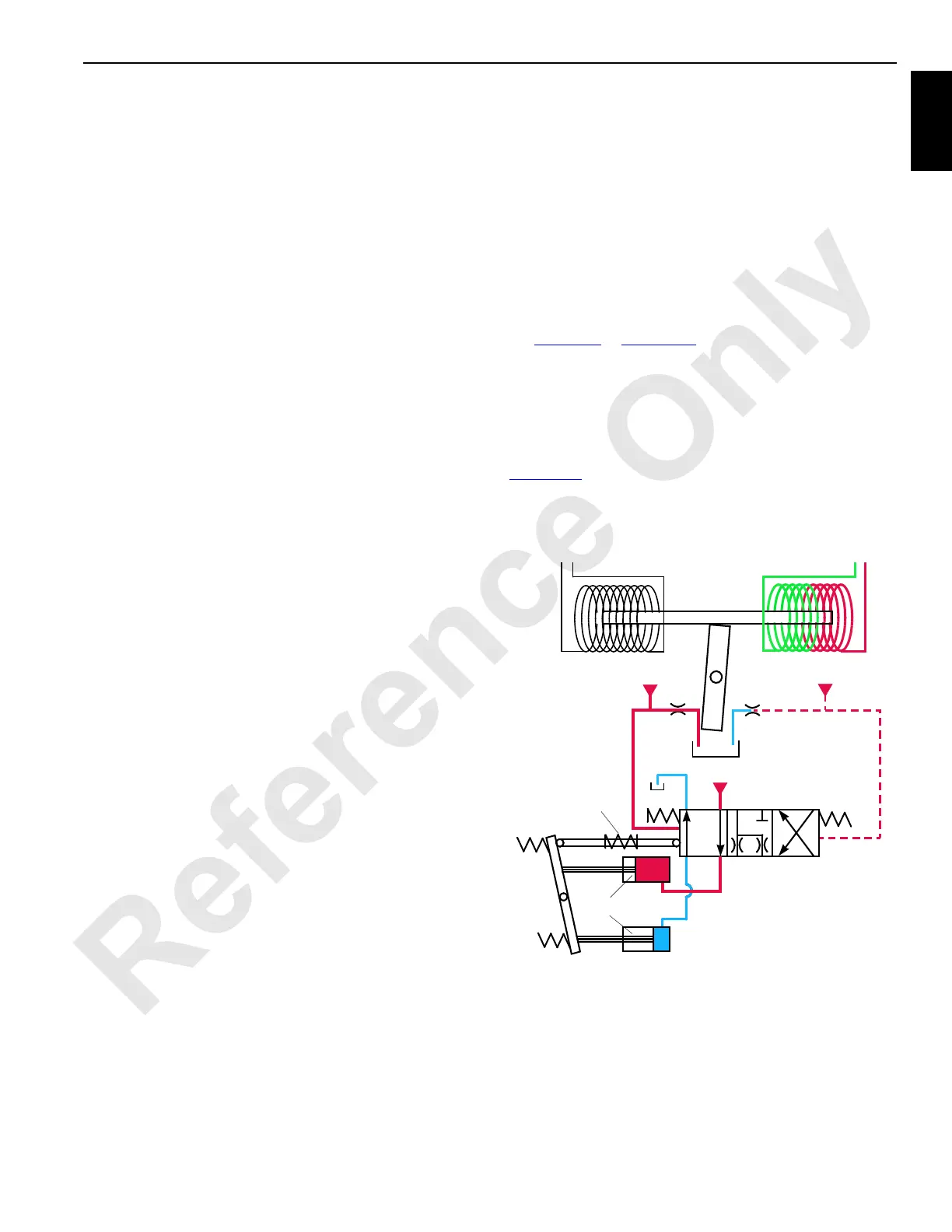
See Figure 1-9 or Figure 1-10 for the following procedure.
When a control handle is moved from neutral, an input
voltage in the handle command direction is sent to Node-1
controller. The selected component node controller sends a
variable 0 to 24 volt output that is divided by a resistor and
applied to pump external EDC (Electrical Displacement
Control). The output current magnetizes an armature
(Figure 1-9
) and starts to block one of the orifice ports,
depending on command direction.
Blockage of flow at exhaust side of right orifice port causes a
pressure difference across spool. This pressure difference
overcomes the resistance of spool spring and moves the
spool proportionally to pressurize top servo pistons. The fluid
from bottom servo pistons is routed to tank. This tilts the
swashplate, stroking the pump in selected command
direction. As swashplate tilts, chamber spring is pulled in the
FIGURE 1-9
Spool
Pilot Pressure
Control Voltage
From Controller
Pilot Pressure
Pilot Pressure
Orifice
Port
Orifice
Port
Spool
Spring
Swashplate
Servo Pistons
Armature
Modulation
Spring
Control Voltage
From Controller
16-1002

 Loading...
Loading...










