INTRODUCTION 16000 SERVICE/MAINTENANCE MANUAL
1-40
Published 05-09-17, Control # 014-28
maximum displacement side of servo cylinder. The PCOR
valve over-rides the command from servo PC valve,
increasing motor displacement and output torque and
reducing output speed. When PCOR valve closes, control of
the motor returns to servo PC valve.
Node controllers continuously balance drum system
pressures and monitor motor displacement angle so motor
displacement goes to minimum when control handle is all the
way back, if motor torque requirements are not too high.
Node-1 controller monitors motor displacement and controls
motor speed by regulating hydraulic fluid flow through the
pump.
When drum control handle is moved to neutral position,
Node-1 controller compensates for hydraulic system leakage
or changing engine speed. Node-3 controller sends a zero
output voltage to pump EDC that moves swashplate to
center position. This shifts the motor back to maximum
displacement for slower output speed to slow drum rotation.
When control handle is moved to neutral position, Node-1
controller stores the load holding pressure in pressure
memory. After drum 3 control handle center switch opens,
Node-6 controller sends a zero output voltage to disable
drum brake release solenoid HS-25. Drum brake solenoid
valve shifts to block pilot pressure to brake and opens a line
to tank. Brake applies before drum pump de-stroke.
When brake applies, an input signal is sent to Node-1
controller. Node-3 controller sends a 0 volt output to pump
EDC to de-stroke pump. Node-6 controller sends a 0 volt
output to motor PCP.
Left travel to drum 3 diverting solenoid HS-28 remains
enabled until left travel handle is moved.
Lowering
See Figure 1-30 and Figure 1-31 for the following procedure.
When drum 3 control handle is moved forward for lowering,
an input voltage of 2.4 volts or less is sent to Node-1
controller. Node-4 controller sends a 24 volt output to enable
left travel to drum 3 diverting solenoid HS-28. Node-3
controller sends a variable zero to 24 volt output that is
divided by a resistor and applied to pump 2 EDC in the
raising direction. Node-6 controller sends a variable zero to
24 volt output that is divided by a resistor and applied to
motor PCP. Node-1 controller checks that drum block-up limit
switches are closed and no system faults are present.
Pump EDC tilts swashplate in the raising direction to satisfy
pressure memory. Node-1 controller compares drum holding
pressure to value in pressure memory. When system
pressure is high enough, Node-6 controller sends a 24 volt
output to enable drum 3 brake release solenoid HS-25. Drum
brake solenoid shifts to block drain port and opens port to
low-pressure side of drum system to release brake from
drum shaft.
The pump EDC tilts swashplate in the lowering direction as
hydraulic fluid flow is from pump port to motor port. Return
fluid is from motor outlet port to pump inlet port.
Node-3 controller output voltages to pump EDC and Node-6
controller output voltage to motor PCP is relative to control
handle movement. As control handle is moved back, an
output voltage increases the pump swashplate angle.
When system pressure exceeds the PCOR (Pressure
Compensating Over-Ride) valve setting of 4,930 psi (340
bar), the valve shifts to direct flow from shuttle valve into
maximum displacement side of servo cylinder. The PCOR
valve over-rides the command from servo PC valve,
increasing motor displacement and output torque and
reducing output speed. When PCOR valve closes, control of
the motor returns to servo PC valve.
Node controllers continuously balance drum system
pressures and monitor motor displacement angle so motor
displacement goes to minimum when control handle is fully
forward, if motor torque requirements are not too high. Node-
1 controller monitors motor displacement and controls motor
speed by regulating hydraulic fluid flow through the pump.
When drum control handle is moved to neutral position,
Node-1 controller compensates for hydraulic system leakage
or changing engine speed. Node-3 controller sends a zero
output voltage to pump EDC that moves swashplate to
center position. This shifts the motor back to maximum
displacement for slower output speed to slow drum rotation.
When control handle is moved to neutral position, Node-1
controller stores the load holding pressure in pressure
memory. After control handle center switch opens, Node-4
controller sends a zero output to disable brake release
solenoid HS-25. Drum brake solenoid valve shifts to block
pilot pressure to brake and opens a line to tank. When brake
applies, an input signal is sent to Node-1 controller. Node-3
controller sends a 0 volt output to drum pump EDC to de-
stroke pump. Node-6 controller sends a 0 volt output to
motor PCP.
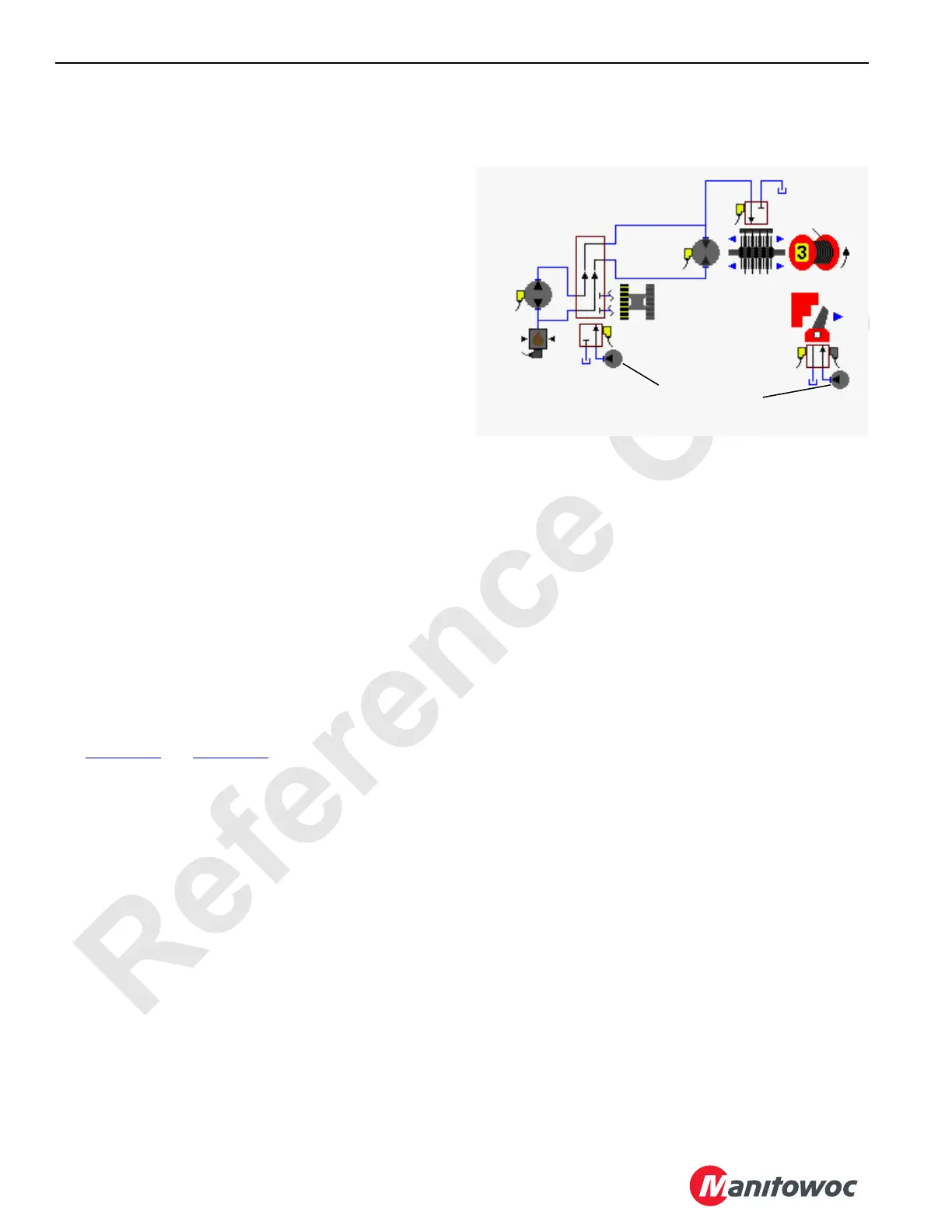
FIGURE 1-30
HS-25
HS-27
HS-28
Brake
Diverting
Valve
Motor
(PCP)
Pump
(EDC)
Pressure
Sender
Pawl
HS-26
16-1022
Accessory Pump
(Low-Pressure)
 Loading...
Loading...











