Chapter 4
4-12
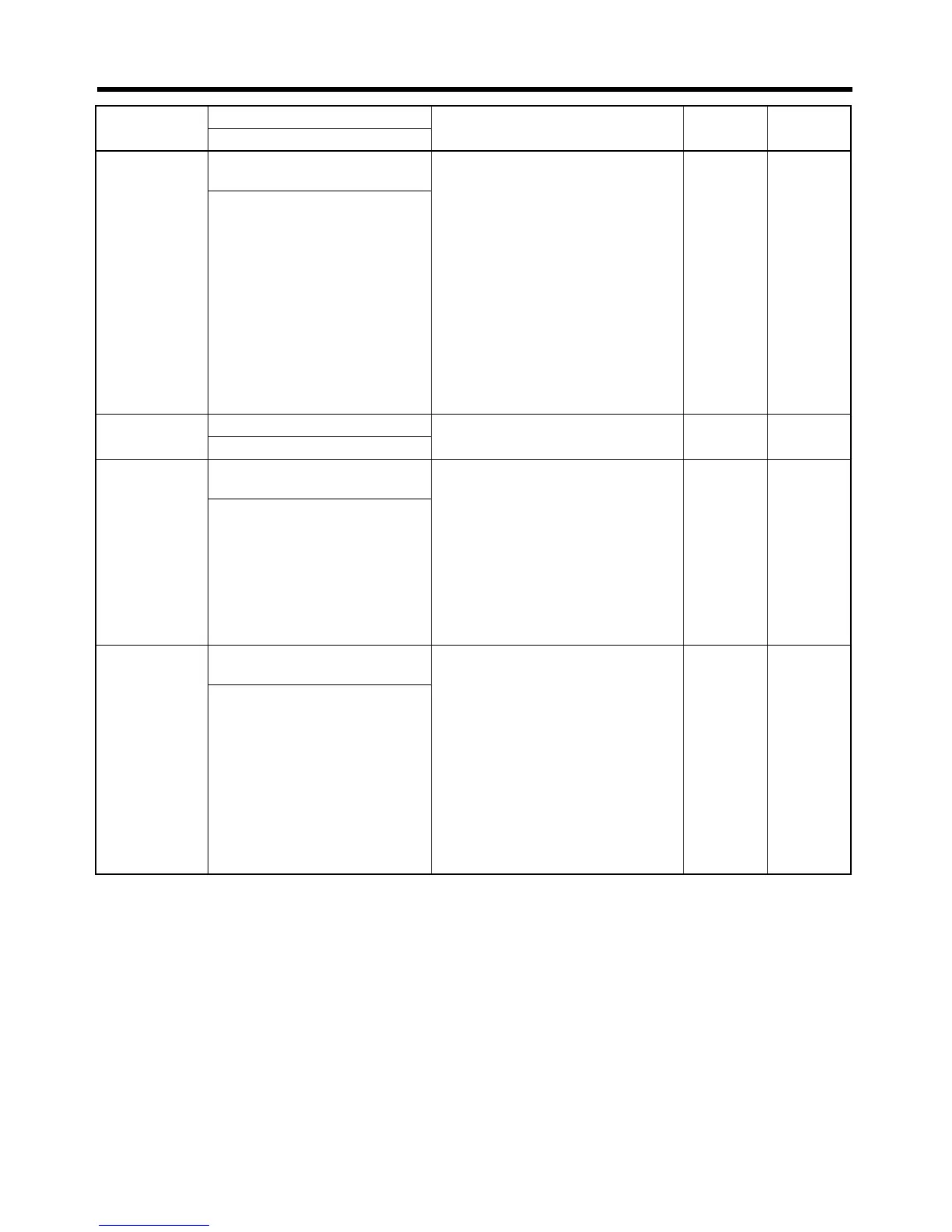
SYSDRIVE Inverter Settings
Note 1. Be sure to set F9-05 to 0 when using flux vector control. If used with the default setting (1),
the torque reference/torque limit will be interpreted as zero and there will be no torque output
unless there is a torque reference/torque limit from control I/O remote I/O.
Note 2. If F9-06 is set to 3 (continues operating), the Inverter will continue operating when a com-
munications fault occurs according to the contents of settings immediately before. Be sure
to take any steps necessary to ensure safety, such as installing a limit switch or an emer-
gency stop switch.
F9-03 Communications external fault
input: operation
Select the Inverter operation per-
formed when there is a communi-
cations external fault input from
communications (DeviceNet Com-
munications Card).
0: Decelerates to a stop using C1-
02 deceleration time/fault detec-
tion
1: Coats to a stop/fault detection
2: Decelerates to a stop using the
C1-09 emergency stop time/
fault detection
3: Continues operating/alarm
detection
0 to 3 1
EFO Fault Action
F9-04 Not used Do not set. --- 0
Trace Sample Tim
F9-05 Torque reference/torque limit
selection from communications
When operating in flux vector con-
trol mode, this setting enables or
disables torque reference and
torque limit values input from com-
munications (DeviceNet Communi-
cations Card). (See note 1.)
0: Torque reference/torque limit
from communications disabled.
1: Torque reference/torque limit
from communications enabled.
0, 1 0
Torq Ref/Lmt Sel
F9-06 Communications fault opera-
tion
Select the Inverter operation per-
formed when a communications
fault is detected.
0: Decelerates to a stop using C1-
02 deceleration time/fault detec-
tion
1: Coats to a stop/fault detection
2: Decelerates to a stop using the
C1-09 emergency stop time/
fault detection
3: Continues operating/alarm
detection (See note 2.)
0 to 3 1
BUS Fault Sel
Parameter
No.
Name Contents Setting
range
Default
setting
Operator display