763
Data Control Instructions Section 3-18
PID Parameter Settings
Control
data
Item Contents Setting range Change with
ON input
condition
C Set value (SV) The target value of the process
being controlled.
Binary data (of the same number
of bits as specified for the input
range)
Allowed
C+1 Proportional band The parameter for P action
expressing the proportional con-
trol range/total control range.
0001 to 270F hex (1 to 9999);
(0.1% to 999.9%, in units of
0.1%)
Can be
changed with
input condition
ON if bit 1 of
C+5 is 1.
C+2 Tik
Integral Constant
A constant expressing the
strength of the integral action. As
this value increases, the integral
strength decreases.
0001 to 1FFF hex (1 to 8191);
(9999 = Integral operation not
executed) (See note 1.)
C+3 Tdk
Derivative Constant
A constant expressing the
strength of the derivative action.
As this value increases, the
derivative strength decreases.
0001 to 1FFF hex (1 to 8191);
(0000 = Derivative operation not
executed) (See note 1.)
C+4 Sampling period (τ) Sets the period for executing the
PID action.
0001 to 270F hex (1 to 9999);
(0.01 to 99.99 s, in units of
10 ms)
Not allowed
Bits 04 to 15
of C+5
2-PID parameter (α) The input filter coefficient. Nor-
mally use 0.65 (i.e., a setting of
000). The filter efficiency
decreases as the coefficient
approaches 0.
000 hex: α = 0.65
Setting from 100 to 163 hex
means that the value of the right-
most two digits is set from α=
0.00 to α= 0.99. (See note 2.)
Bit 03 of C+5 Manipulated vari-
able output designa-
tion
Designates the manipulated vari-
able output when the PV equals
the SV.
Note This setting is enabled
when there is no integral
operation.
0: Output 0%
1: Output 50%
Bit 01 of C+5 PID constant
change enable set-
ting
The timing of enabling changes
made to the proportional band
(P), integral constant (Tik), and
derivative constant (Tdk) for use
in PID calculations.
0: At start of PID instruction exe-
cution
1: At start of PID instruction exe-
cution and each sampling period
Allowed
(1)
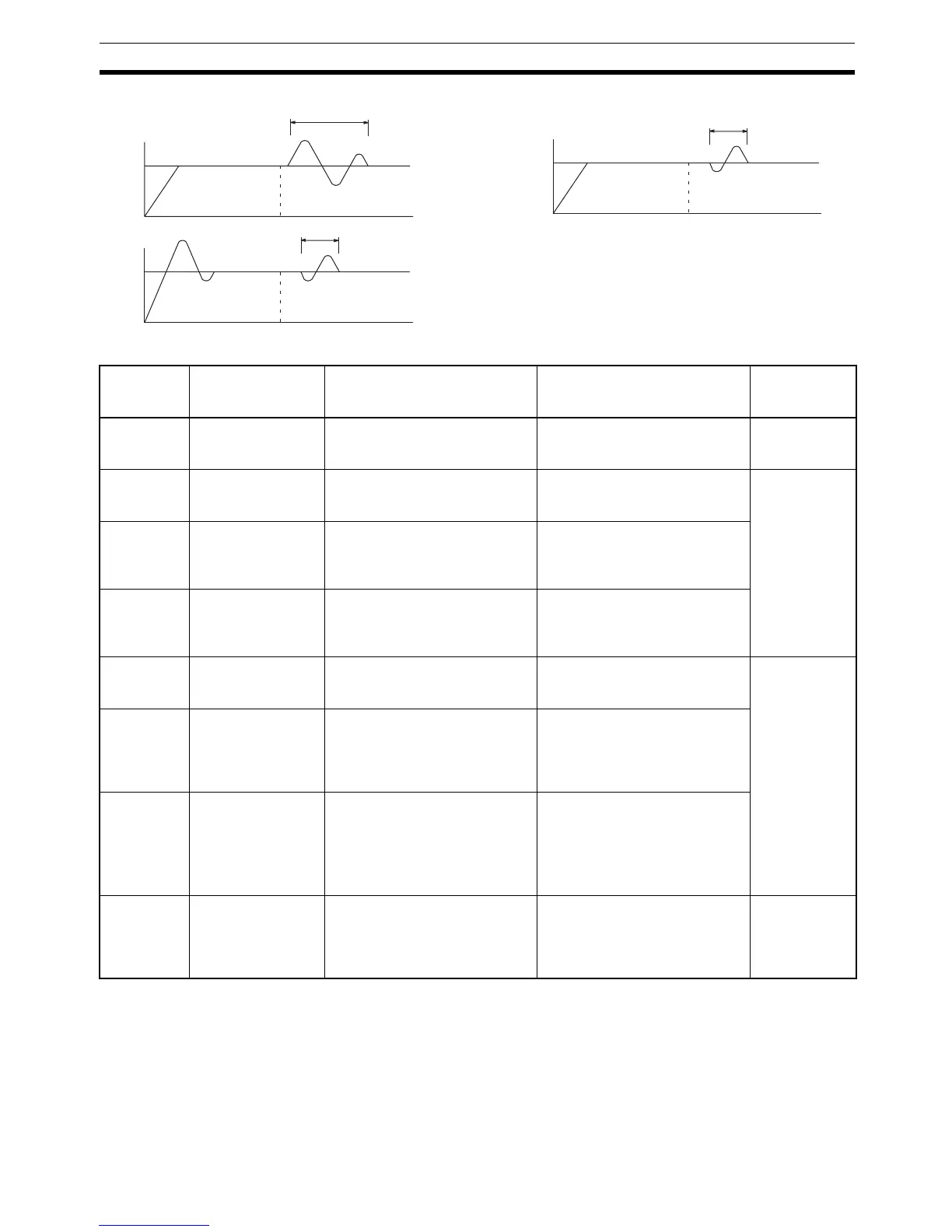
(2)
(3)
Disturbance response
Simple PID Control
Feed-forward PID Control
As the target response is slowed,
the disturbance response worsens.
As the disturbance response is
slowed, the target response worsens.
Overshoot
Target response