Parker EME
Setting up Compax3
192-120113 N08 C3I12T11 - December 2010
That is:
MasterPos =
Master_I
*
Travel Distance per Master Axis revolution
(M_Units/rev)
(1)
I_M
Travel Distance per Master Axis revolution -
Denominator
MasterPos: Master Position
Master_I: master increments read in
I_M: Increments per revolution of the master axis
Encoder with 1024 increments per master revolution and a circumference of the
measuring wheel of 40mm.
Travel path per revolution of the master axis numerator = 40
Travel path per revolution of the master axis denominator = 1
Increments per revolution of the master axis = 1024
Reference system of Slave axis: Unit of measure [mm]
Travel path per revolution numerator = 1
Travel path per revolution denominator = 1
Gearing numerator = 2
Gearing denominator = 1
This results in the following interrelations:
If the measuring wheel moves by 40mm (1 master revolution), the slave axis will
move by 80mm.
Slave unit = MasterPos *
Gearing
numerator
(2)
Gearing
denominator
(1) set into (2) and with numerical values results with 1024 increments read in (=1
Master revolution):
Slave unit = 1024 *
1
*
40mm
*
2
= 80mm
1024
1
1
Master - Position = +40mm => Slave - Position = +80mm
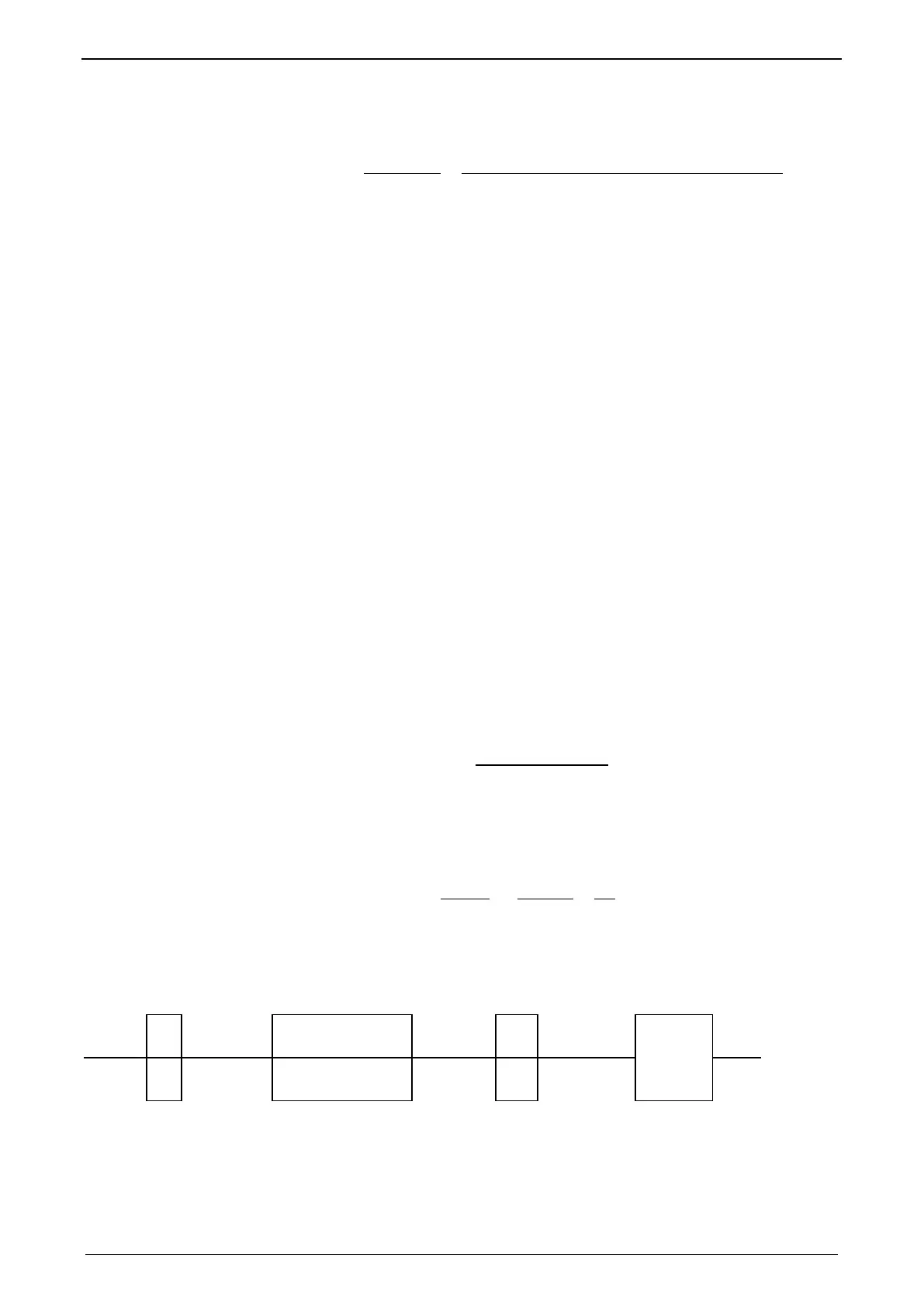
Structure:
Master Z1 MasterPos Gearing
numerator
Slave - N2 Slave_U
Gearbox
Load
N1 Gearing
denominator
Units Z2 to motor
Configuration