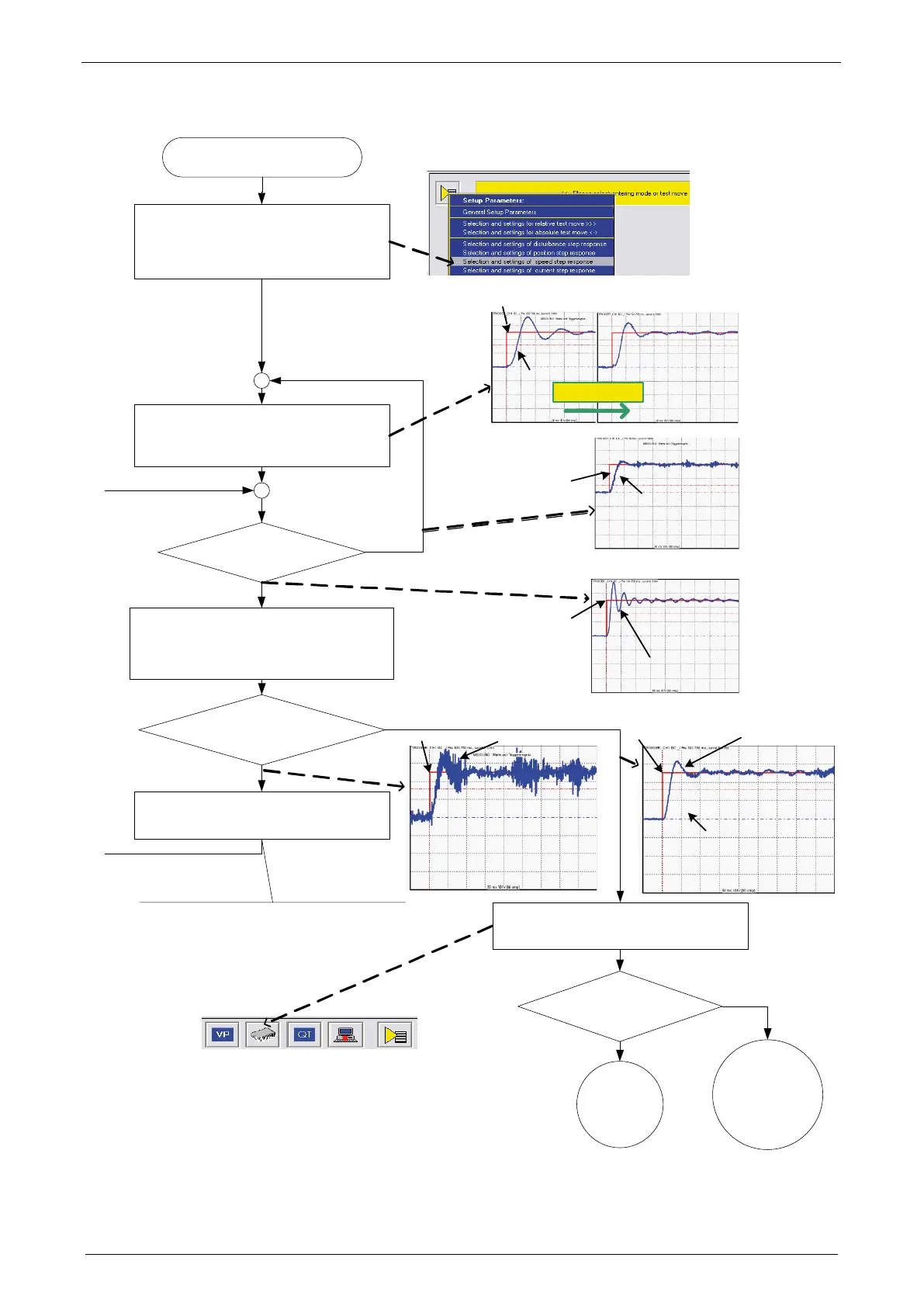
Smooth, stable behavior?
Increase stiffness (Obj. 2100.2)
Adapt control signal filter according to the setting
rule (see chapter “control signal filter/...”)
(if needs be, change attenuation (Obj. 2100.3)
yes
no
Select speed jerk response in the setup window /
tab “parameter), select the size of the jerk and
define jerk.
Respect the setpoint speed and the actual speed
Increase control signal filter of speed control
(Obj. 2100.20)
Additional filtering required?
(e.g. in the event of loud noise)
yes
no
Main diagram
„Controller optimization standard“
Please note that a stronger filtering may destabilize
the control loop Please try to find a compromise
between the signal quality (filtering) and the
controller speed (stiffness)
Setpoint speed Actual speed
Following error
Actual speed
Setpoint speed
Incraseattenuatin
Setpoint speed
Actual speed
Actual speed
Setpoint speed
Setpoint speed Actual speed
Move over the entire positioning range, verify the
settings and correct if necessary.
Store settings with WF!
Stabilize controller with the aid of:
• Decrease stiffness (Obj. 2100.2)
• or/also reduce filter 2 speed actual value
(Obj. 2100.10)
• or/also increase attenuation (Obj. 2100.3)
Further optimization necessary?
“Controller
optimization
Advanced”
yes
no