5-4 Determining Basic Drive Configuration SYNAX200
DOK-SYNAX*-SY*-07VRS**-PR01-EN-P
5.2 Rotary Axes
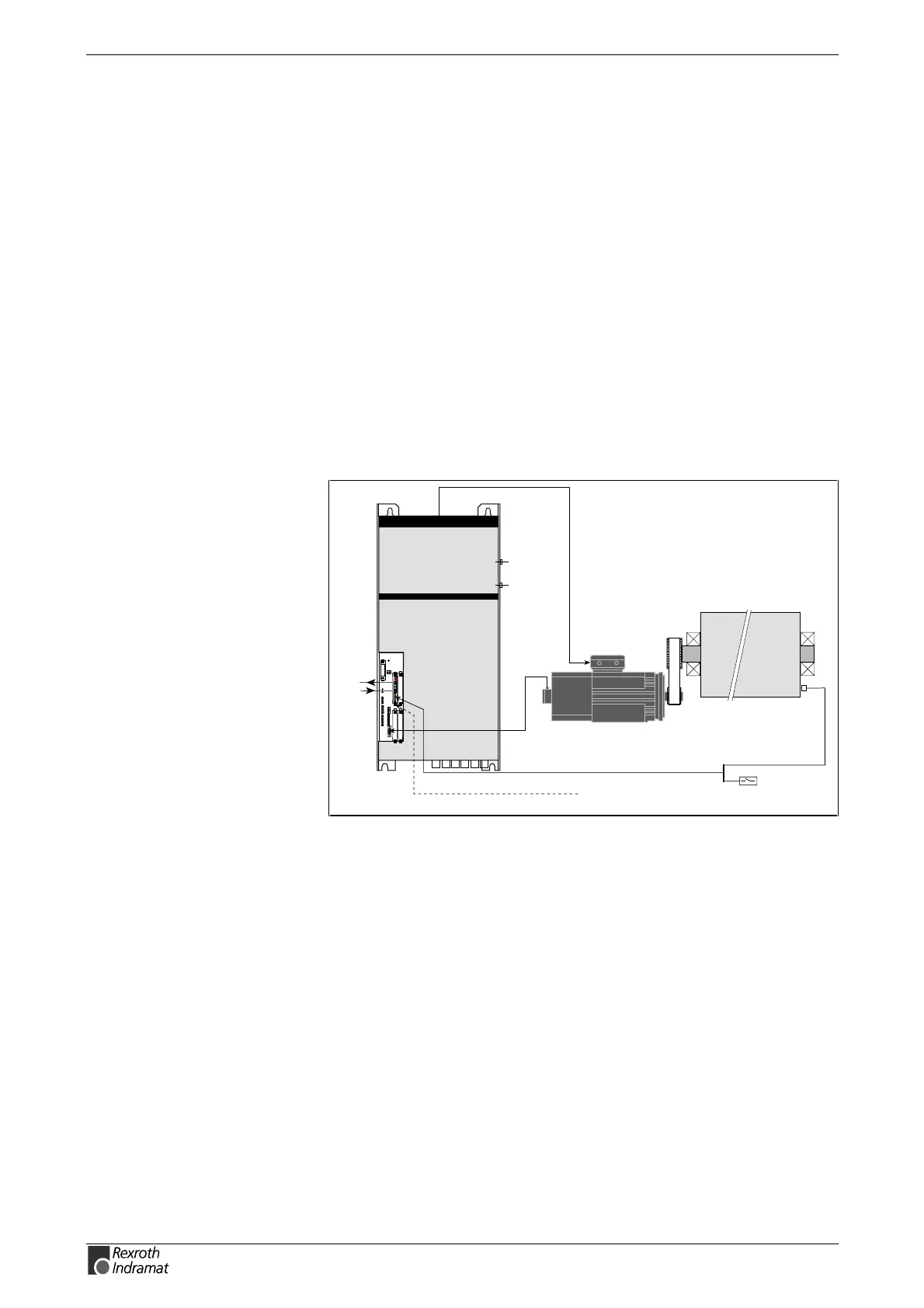
Drive with Step-Down Gear and Indirect Position Detection
• Precision is determined with gear error
(generally four angle minutes)
• encoder is integrated into motor
• motor encoder with singleturn or multiturn absolute encoder
Usable Motors DKR:
• 2AD with HSF (HSF: digital servo feedback)
• ADF with HSF
Basic Drive Configuration BE12 (DKR):
2AD
ADF
DIGITAL COMPACT CONTROLLER
DKR 4
H1
X4
X2
U5
U2
S2
U4
U1 U3
X9
1
6
1
7
X8
H2
S1
X3
X7
1
10
1
11
X3
IKS 374
reference switch
scale input
LWL
U1 (DSS)
SY7PR004.FH7
Fig. 5-5: Drive with step-down gears and indirect position detection
Features:
2AD with HSF, ADF with HSF