5-14 Determining Basic Drive Configuration SYNAX200
DOK-SYNAX*-SY*-07VRS**-PR01-EN-P
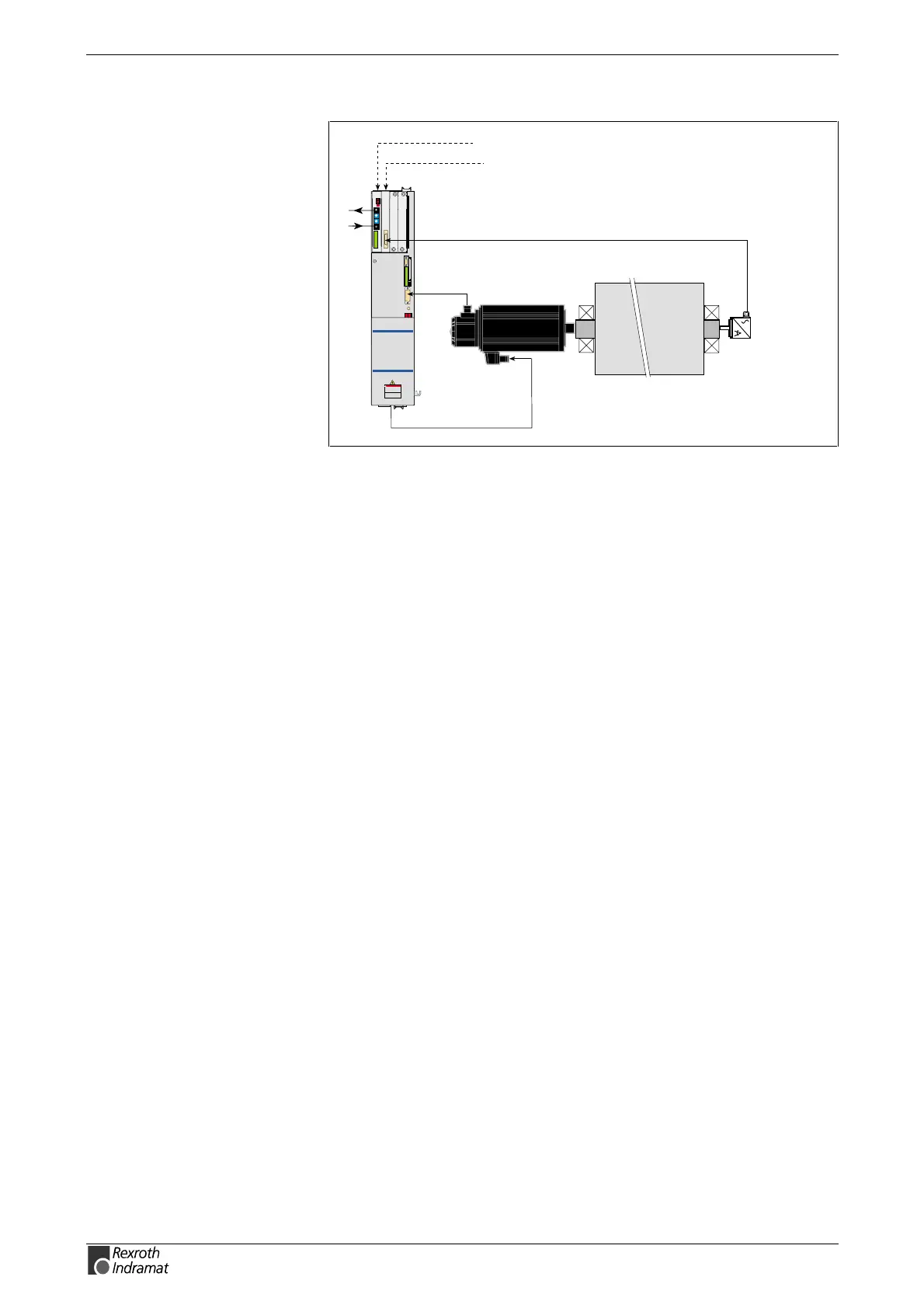
Basic Drive Configuration HS32 (DIAX04):
Read and follow
Instructions for Electrical Drives"
manual,
DOK-GENERL-DRIVE******-SVS...
DANG
High oltage.
Danger of electrical shock.
Donot touch electrical connections
fo
5 minutes after switching
LWL
U1 (DSS)
U2 (DLF)
MHD
MKD
MKE
MBS
IKS4383
IKS374
SY7PR093.FH7
external
incremental encoder
with sine output
e.g., Heidenhain
ROD 481
ERN 180
ERN 680
RON 285
Fig. 5-16: Drive with MHD, MKD, MKE or MBS motor with direct incremental
position detection
Drive with Direct Absolute Position Detection
• no gear between motor and cylinder
• high level of precision an be achieved
• load angle directly detected via absolute external encoder
• gear error statically compensated
• With MHD, MKD, MKE and MBS motors:
- motor encoder for commutation is needed
- absolute position detection via external encoder
• With MBW, 1MB, 2AD and ADF motors:
- no separate motor encoder
- absolute position detection
• With MBW, MBS and 1MB motors:
- rigid coupling between motor and cylinder, meaning highest
level of static and dynamic stiffness
Usable Motors DKR:
• MBW (without motor encoder)
• 1MB (without motor encoder)
• 2AD (without motor encoder)
• ADF (without motor encoder)
• MBS (only in connection with motor encoder)
MHD, MKD, MKE, MBS:
Features: